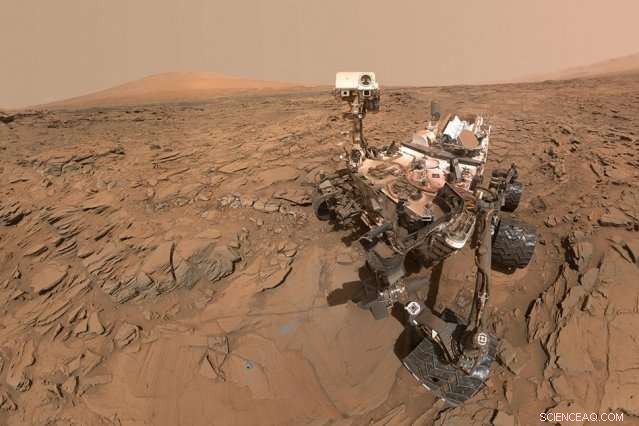
Un autoportrait du rover Curiosity Mars de la NASA. Crédit :NASA/JPL-Caltech/MSSS
La sélection d'un site d'atterrissage pour un rover se dirigeant vers Mars est un long processus qui implique normalement de grands comités de scientifiques et d'ingénieurs. Ces comités passent généralement plusieurs années à comparer les objectifs scientifiques d'une mission aux contraintes techniques d'un véhicule, pour identifier des sites qui sont à la fois scientifiquement intéressants et sûrs pour atterrir.
Par exemple, l'équipe scientifique d'une mission peut vouloir explorer certains sites géologiques à la recherche de traces d'eau, la vie, et l'habitabilité. Mais les ingénieurs peuvent trouver que ces sites sont trop raides pour qu'un véhicule puisse atterrir en toute sécurité, ou les emplacements peuvent ne pas recevoir suffisamment de lumière du soleil pour alimenter les panneaux solaires du véhicule une fois qu'il a atterri. Trouver un site d'atterrissage approprié implique donc de reconstituer les informations recueillies au fil des ans par les missions passées sur Mars. Ces données, en grandissant à chaque mission, sont inégaux et incomplets.
Aujourd'hui, les chercheurs du MIT ont développé un outil logiciel pour la découverte assistée par ordinateur qui pourrait aider les planificateurs de mission à prendre ces décisions. Il produit automatiquement des cartes des sites d'atterrissage favorables, en utilisant les données disponibles sur la géologie et le terrain de Mars, ainsi qu'une liste de priorités scientifiques et de contraintes d'ingénierie qu'un utilisateur peut spécifier.
Par exemple, un utilisateur peut stipuler qu'un rover doit atterrir dans un site où il peut explorer certaines cibles géologiques, comme les lacs à ciel ouvert. À la fois, le site d'atterrissage ne doit pas dépasser une certaine pente, sinon, le véhicule se renverserait en tentant d'atterrir. Le programme génère ensuite une « carte de favorabilité » des sites d'atterrissage répondant aux deux contraintes. Ces emplacements peuvent changer et changer à mesure qu'un utilisateur ajoute des spécifications supplémentaires.
Le programme peut également définir les chemins possibles qu'un rover peut emprunter depuis un site d'atterrissage donné jusqu'à certaines caractéristiques géologiques. Par exemple, si un utilisateur spécifie qu'un rover doit explorer les expositions de roches sédimentaires, le programme produit des chemins vers de telles structures à proximité et calcule le temps qu'il faudrait pour les atteindre.
Victor Pankratius, chercheur principal à l'Institut Kavli d'astrophysique et de recherche spatiale du MIT, affirme que les planificateurs de mission peuvent utiliser le programme pour envisager rapidement et efficacement différents scénarios d'atterrissage et d'exploration.
"Cela ne remplacera jamais le comité actuel, mais cela peut rendre les choses beaucoup plus efficaces, parce que vous pouvez jouer avec différents scénarios pendant que vous parlez, " dit Pankratius.
L'étude de l'équipe a été publiée en ligne le 31 août par Sciences de la Terre et de l'Espace et fait partie du numéro en ligne du 8 septembre de la revue.
Nouveaux sites
Pankratius et le post-doctorant Guillaume Rongier, au Département de la Terre du MIT, Sciences atmosphériques et planétaires, a créé le programme pour identifier des sites d'atterrissage favorables pour une mission conceptuelle similaire au rover Mars 2020 de la NASA, qui est conçu pour atterrir à l'horizontale, même, zones sans poussière et vise à explorer une ancienne, potentiellement habitable, site avec des affleurements magmatiques.
Ils ont découvert que le programme avait identifié de nombreux sites d'atterrissage pour le rover qui avaient été envisagés dans le passé, et il a mis en évidence d'autres sites de débarquement prometteurs qui ont été rarement proposés. "Nous voyons qu'il y a des sites que nous pourrions explorer avec les technologies de rover existantes, que les comités des sites de débarquement voudront peut-être reconsidérer, " dit Pankratius.
Le programme pourrait également être utilisé pour explorer les exigences techniques des futures générations de rovers martiens. "En supposant que vous puissiez atterrir sur des courbes plus raides, ou rouler plus vite, alors nous pouvons déduire quelles nouvelles régions vous pouvez explorer, " dit Pankratius.
Un atterrissage flou
Le logiciel repose en partie sur la "logique floue, " un schéma de logique mathématique qui regroupe les choses non pas de façon binaire comme la logique booléenne, comme oui/non, vrai faux, ou sûr/dangereux, mais de façon plus fluide, mode basée sur les probabilités.
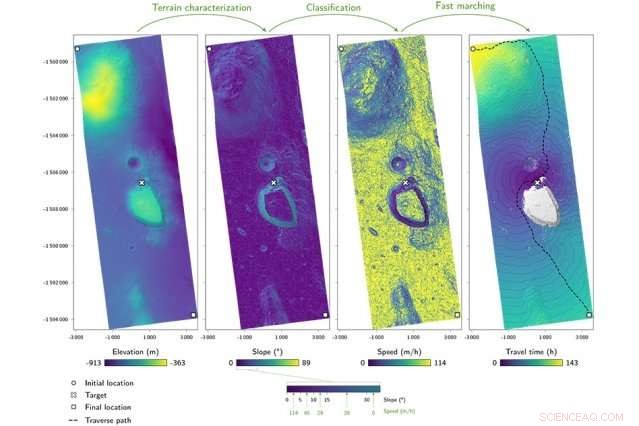
La figure montre les étapes successives pour imiter un rover roulant autour de Mars. Les chercheurs du MIT ont développé une méthode pour caractériser d'abord le terrain sur la zone d'intérêt. Sur la base de cette caractérisation et des caractéristiques du rover, ils utilisent un algorithme de « marche rapide » pour estimer la vitesse du rover, qu'ils utilisent pour calculer le temps qu'il faut pour conduire n'importe où dans cette zone. Ils peuvent également estimer le chemin le plus court à partir d'un emplacement initial, à une cible, vers un emplacement final. Crédit :NASA/JPL/Université d'Arizona, Guillaume Rongier
"Traditionnellement cette idée vient des mathématiques, où au lieu de dire qu'un élément appartient à un ensemble, Oui ou non, la logique floue dit qu'il appartient avec une certaine probabilité, " reflétant ainsi des informations incomplètes ou imprécises, Pankratius explique.
Dans le cadre de la recherche d'un site d'atterrissage approprié, le programme calcule la probabilité qu'un rover puisse gravir une certaine pente, avec la probabilité décroissant à mesure que l'emplacement a devient plus raide.
"Avec la logique floue, nous pouvons exprimer cette probabilité spatialement - à quel point est-ce grave si je suis aussi raide, contre cette pente raide, " dit Pankratius. " C'est une façon de gérer l'imprécision, dans un sens."
En utilisant des algorithmes liés à la logique floue, l'équipe crée du brut, ou initiale, cartes de favorabilité des sites d'atterrissage possibles sur l'ensemble de la planète. Ces cartes sont quadrillées en cellules individuelles, chacun représentant environ 3 kilomètres carrés à la surface de Mars. Le programme calcule, pour chaque cellule, la probabilité qu'il s'agisse d'un site d'atterrissage favorable, et génère une carte dont la couleur est graduée pour représenter des probabilités entre 0 et 1. Les cellules plus sombres représentent des sites avec une probabilité proche de zéro d'être un site d'atterrissage favorable, tandis que les emplacements plus légers ont plus de chances d'atterrir en toute sécurité avec des perspectives scientifiques intéressantes.
Une fois qu'ils ont généré une carte brute des sites d'atterrissage possibles, les chercheurs prennent en compte diverses incertitudes sur le lieu d'atterrissage, tels que les changements de trajectoire et les erreurs de navigation potentielles pendant la descente. Compte tenu de ces incertitudes, le programme génère alors des ellipses d'atterrissage, ou des cibles circulaires où un rover est susceptible d'atterrir pour maximiser la sécurité et l'exploration scientifique.
Le programme utilise également un algorithme connu sous le nom de marche rapide pour tracer les chemins qu'un rover peut emprunter sur un terrain donné une fois qu'il a atterri. La marche rapide est généralement utilisée pour calculer la propagation d'un front, comme la vitesse à laquelle un front de vent atteint un rivage s'il se déplace à une vitesse donnée. Pour la première fois, Pankratius et Rongier ont appliqué la marche rapide pour calculer le temps de trajet d'un rover lorsqu'il se déplace d'un point de départ à une structure géologique d'intérêt.
"Si vous êtes quelque part sur Mars et que vous obtenez cette carte traitée, vous pouvez demander, 'D'ici, à quelle vitesse puis-je aller à n'importe quel point de mon environnement ? Et cet algorithme vous dira, " dit Pankratius.
L'algorithme peut également tracer des itinéraires pour éviter certains obstacles qui peuvent ralentir le voyage d'un rover, et tracer les probabilités de heurter certains types de structures géologiques dans une zone d'atterrissage.
"Il est plus difficile pour un rover de traverser la poussière, donc ça ira à un rythme plus lent, et la poussière n'est pas forcément partout, juste en patchs, " dit Rongier. " L'algorithme tiendra compte de ces obstacles lors de la cartographie des chemins de traverse les plus rapides. "
Les équipes affirment que les opérateurs des rovers actuels sur la surface martienne peuvent utiliser le logiciel pour diriger les véhicules plus efficacement vers des sites d'intérêt scientifique. À l'avenir, Pankratius envisage que cette technique ou quelque chose de similaire soit intégrée dans des rovers de plus en plus autonomes qui n'exigent pas que les humains conduisent les véhicules tout le temps depuis la Terre.
"Un jour, si nous avons des rovers totalement autonomes, ils peuvent prendre en compte toutes ces choses pour savoir où aller, et être capable de s'adapter à des situations imprévues, " dit Pankratius. " Vous voulez de l'autonomie, sinon cela peut prendre beaucoup de temps pour communiquer dans les deux sens lorsque vous devez prendre des décisions critiques rapidement."
L'équipe étudie également les applications des techniques dans l'exploration de sites géothermiques sur Terre en collaboration avec le MIT Earth Resources Lab du Département de la Terre, Sciences atmosphériques et planétaires.
"C'est un problème très similaire, " Pankratius dit. " Au lieu de dire 'Est-ce un bon site, Oui ou non?' tu peux dire, « Montrez-moi une carte de toutes les zones qui seraient probablement viables pour l'exploration géothermique. »
À mesure que les données s'améliorent, à la fois pour Mars et pour les structures géothermiques sur Terre, il dit que ces données peuvent être introduites dans le programme existant pour fournir des analyses plus précises.
« Le programme est progressivement évolutif, " il dit.
Cette histoire est republiée avec l'aimable autorisation de MIT News (web.mit.edu/newsoffice/), un site populaire qui couvre l'actualité de la recherche du MIT, innovation et enseignement.