Une équipe de recherche de Cornell a développé une nouvelle façon de concevoir des machines complexes à l'échelle microscopique, qui s'inspire du fonctionnement des protéines et du bec des colibris.
L'article du groupe, "Bifurcation Instructed Design of Multistate Machines", publié dans Proceedings of the National Academy of Sciences . L'auteur principal est Itay Griniasty, chercheur postdoctoral Schmidt AI dans le laboratoire d'Itai Cohen, professeur de physique au Collège des Arts et des Sciences.
Construire des machines de plus en plus petites ne consiste pas simplement à réduire les composants. Alors que les machines macroscopiques sont généralement conçues pour être compartimentées, divisant une tâche en petits morceaux et attribuant chacun à une partie différente de la machine, les protéines – les machines microscopiques par excellence responsables d’une grande partie de la biologie – ont une conception différente. Les tâches sont souvent accomplies grâce au mouvement coordonné de tous les composants de la protéine, ce qui les rend plus robustes face au chaos du monde microscopique.
Auparavant, le groupe de Cohen avait utilisé les principes de l'origami pour fabriquer une série de dispositifs à micro-échelle, allant des structures auto-pliantes aux microrobots ambulants, innovants par leur taille mais relativement basiques dans leurs fonctions. Ajouter des fonctionnalités dans les feuilles d'origami s'avère être une tâche difficile.
"Les machines que nous avons fabriquées jusqu'à présent sont très, très simples. Mais lorsque nous avons commencé à réfléchir à la manière d'augmenter les fonctionnalités des systèmes hautement couplés, nous avons commencé à réaliser que chaque fois que vous déplacez une partie de la machine, toutes les d'autres parties bougent", a déclaré Cohen. "C'est exaspérant, parce qu'on ne peut rien isoler, tout est connecté dans ces feuilles. Ensuite, nous avons commencé à nous demander comment cela se faisait dans le monde microscopique."
Une protéine, disaient-ils, pourrait être considérée comme une machine passant d’un état à l’autre en réponse à de petits changements de quelques paramètres. Les chercheurs se sont inspirés d'un exemple de ce type de fonctionnalité à l'échelle macro :le colibri.
Une étude réalisée en 2010 par Andy Ruina, professeur John F. Carr de génie mécanique, a montré comment le bec d'un colibri peut être « ouvert en douceur puis fermé par une séquence appropriée d'actions de flexion et de torsion par les muscles de la mâchoire inférieure ». /P>
Ce système s'explique par une idée mathématique appelée bifurcation cuspidienne, dans laquelle, en fonction des forces exercées par les muscles de la mâchoire, le bec peut avoir un seul état stable, c'est-à-dire fermé, ou deux états stables, ouvert et fermé. Le point auquel l'état stable unique se divise en deux états stables est la bifurcation cuspidienne.
L’avantage d’opérer autour d’une bifurcation cuspidienne est qu’il offre deux caractéristiques de conception clés. La première est la protection topologique, qui garantit la cohérence des performances d'un appareil, de sorte que si les muscles de la mâchoire tirent légèrement différemment, le bec peut toujours s'ouvrir et se fermer. Le second est un avantage de levier, qui garantit que les muscles n'ont besoin que d'un petit mouvement pour activer un changement important dans le bec. Ce sont exactement les composants nécessaires pour réaliser une fonction à l'échelle microscopique.
Cohen, Griniasty et leurs collaborateurs se demandaient s’ils pouvaient augmenter le nombre d’États organisés autour d’une bifurcation de deux – c’est-à-dire ouverts et fermés – à des dizaines, voire des centaines. Cette extension permettrait la conception de machines remplissant des fonctions complexes.
"Au lieu de regrouper des fonctions compartimentées, ces capacités émergeraient de l'objet dans son ensemble", a déclaré Griniasty. "C'est danser ensemble."
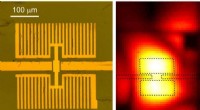
Les chercheurs ont recruté Teaya Yang '22 et Yuchao Chen '19, tous deux co-auteurs, pour créer un modèle magnéto-élastique à l'échelle macro de validation de principe avec une bifurcation en papillon qui permettait au système de s'enclencher ou de passer en douceur entre trois états stables. Le modèle se composait de deux panneaux, dont l’un se déplaçait dans un plan tandis que l’autre était libre de tourner autour d’une charnière fixe. Chaque panneau était décoré de neuf aimants qui interagissaient les uns avec les autres, créant des interactions complexes rappelant celles trouvées dans les protéines.
Cependant, un défi majeur consistait à trouver une méthode permettant de concevoir des modèles magnétiques susceptibles de provoquer la bifurcation souhaitée. Griniasty et David Hathcock, Ph.D. '22 a surmonté le problème en développant un algorithme basé sur les travaux sur les systèmes dynamiques de John Guckenheimer, l'A.R. Professeur émérite Bullis de mathématiques (A&S).
"Si nous essayions simplement de deviner ces modèles magnétiques, pour générer de multiples équilibres, nous manquerions de puissance de calcul", a déclaré Cohen. "Itay a donc conçu un très bel algorithme qui simplifie la recherche."
La prochaine étape consistera à démontrer le concept à l'échelle microscopique.
"Pour une machine de 100 microns, comme les robots typiques que nous fabriquons, Itay a calculé que nous pourrions atteindre 20 états distincts", a déclaré Cohen. "C'est un peu ce que nous envisageons de réaliser à l'échelle microscopique, une machine dans laquelle j'utilise un actionneur pour déplacer l'un des panneaux, et la configuration de la machine entière pourrait basculer entre 20 configurations différentes. Vous pourriez avoir une machine qui pourrait, disons, locomotion à travers un fluide, ou peut-être effectuer une action de préhension compliquée."
Plus d'informations : Teaya Yang et al, Conception chargée de la bifurcation de machines multi-états, Actes de l'Académie nationale des sciences (2023). DOI : 10.1073/pnas.2300081120
Informations sur le journal : Actes de l'Académie nationale des sciences
Fourni par l'Université Cornell