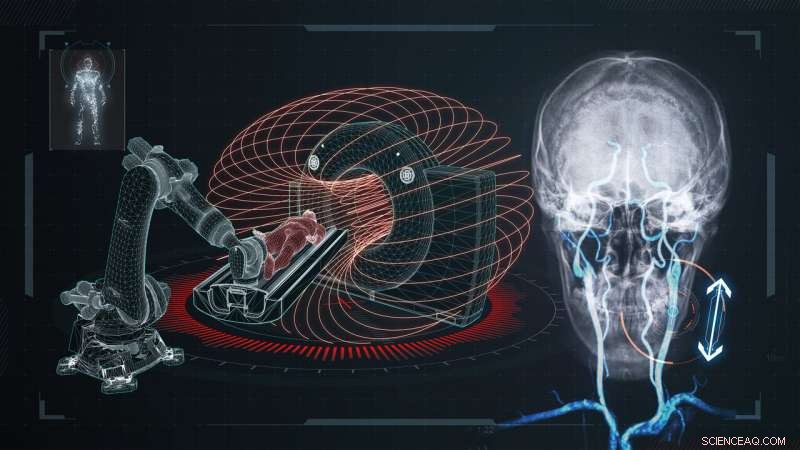
Une équipe dirigée par le professeur Sylvain Martel du Laboratoire de nanorobotique de Polytechnique Montréal a développé une nouvelle approche pour relever l'un des plus grands défis de la chirurgie endovasculaire :comment atteindre les endroits physiologiques les plus difficiles d'accès. Leur solution est une plate-forme robotique qui utilise le champ marginal généré par l'aimant supraconducteur d'un scanner d'imagerie par résonance magnétique (IRM) clinique pour guider les instruments médicaux à travers des structures vasculaires plus profondes et plus complexes. L'approche a été démontrée avec succès in-vivo. Crédit :Massouh bioMEDia pour le Laboratoire de nanorobotique de Polytechnique Montréal
Une équipe dirigée par le professeur Sylvain Martel du Laboratoire de nanorobotique de Polytechnique Montréal a développé une nouvelle approche pour relever l'un des plus grands défis de la chirurgie endovasculaire :comment atteindre les endroits physiologiques les plus difficiles d'accès. Leur solution est une plate-forme robotique qui utilise le champ marginal généré par l'aimant supraconducteur d'un scanner d'imagerie par résonance magnétique (IRM) clinique pour guider les instruments médicaux à travers des structures vasculaires plus profondes et plus complexes. L'approche a été démontrée avec succès in vivo , et fait l'objet d'un article qui vient de paraître dans Robotique scientifique .
Quand un chercheur « sort des sentiers battus », littéralement
Imaginez devoir pousser un fil aussi fin qu'un cheveu humain de plus en plus profondément à l'intérieur d'un très long, tube très étroit plein de rebondissements. Le manque de rigidité du fil, ainsi que les forces de frottement exercées sur les parois du tube, finira par rendre la manœuvre impossible, avec le fil se retrouvant replié sur lui-même et coincé dans un tour du tube. C'est exactement le défi auquel sont confrontés les chirurgiens qui cherchent à effectuer des procédures peu invasives dans des parties toujours plus profondes du corps humain en dirigeant un fil de guidage ou d'autres instruments (comme un cathéter) à travers des passages étroits, réseaux tortueux de vaisseaux sanguins.
C'est possible, cependant, pour exploiter une force de traction directionnelle pour compléter la force de poussée, contrer les forces de friction à l'intérieur du vaisseau sanguin et déplacer l'instrument beaucoup plus loin. La pointe de l'appareil est aimantée, et entraîné à l'intérieur des vaisseaux par la force d'attraction d'un autre aimant. Seul un puissant aimant supraconducteur à l'extérieur du corps du patient peut fournir l'attraction supplémentaire nécessaire pour diriger le dispositif magnétisé aussi loin que possible. Il existe un équipement hospitalier moderne qui peut jouer ce rôle :un scanner IRM, qui possède un aimant supraconducteur qui génère un champ des dizaines de milliers de fois plus fort que celui de la Terre.
Le champ magnétique à l'intérieur du tunnel d'un scanner IRM, cependant, est uniforme ; c'est la clé de la façon dont l'imagerie du patient est réalisée. Cette uniformité pose problème :tirer la pointe de l'instrument à travers les structures vasculaires labyrinthiques, le champ magnétique guidant doit être modulé à la plus grande amplitude possible puis être diminué le plus rapidement possible.
En méditant sur ce problème, Le professeur Martel a eu l'idée de ne pas utiliser le champ magnétique principal présent à l'intérieur du tunnel de la machine IRM, mais le soi-disant champ de frange en dehors de la machine. « Les fabricants de scanners IRM réduiront normalement le champ de frange au minimum, " explique-t-il. " Le résultat est un champ de très haute amplitude qui décroît très rapidement. Pour nous, ce champ frange représente une excellente solution qui est de loin supérieure aux meilleures approches de guidage magnétique existantes, et c'est dans un espace périphérique propice aux interventions à échelle humaine. Au meilleur de notre connaissance, c'est la première fois qu'un champ de frange d'IRM est utilisé pour une application médicale, " il ajoute.
Déplacer le patient plutôt que le terrain
Pour diriger un instrument profondément dans les vaisseaux sanguins, non seulement une force d'attraction forte est requise, mais cette force doit être orientée pour tirer la pointe magnétique de l'instrument dans diverses directions à l'intérieur des vaisseaux. En raison de la taille et du poids du scanner IRM, il est impossible de le déplacer pour changer la direction du champ magnétique. Pour contourner ce problème, le patient est plutôt déplacé à proximité de l'appareil d'IRM. La plateforme développée par l'équipe du professeur Martel utilise une table robotisée positionnée dans le champ périphérique à côté du scanner.
La table, conçu par Arash Azizi, l'auteur principal de l'article et un doctorat en génie biomédical. candidat dont le directeur de thèse est le professeur Martel—peut se déplacer sur tous les axes pour positionner et orienter le patient selon la direction dans laquelle l'instrument doit être guidé à travers son corps. La table change automatiquement de direction et d'orientation pour positionner le patient de manière optimale pour les étapes successives du trajet de l'instrument grâce à un système qui cartographie les forces directionnelles du champ magnétique du scanner IRM, une technique que le professeur Martel a baptisée Fringe Field Navigation (FFN).
Un in vivo L'étude de la FFN avec cartographie aux rayons X a démontré la capacité du système à piloter efficacement et de manière minimalement invasive des instruments de très petit diamètre au plus profond de structures vasculaires complexes qui étaient jusqu'alors inaccessibles par les méthodes connues.
Des robots à la rescousse des chirurgiens
Cette solution robotique, qui surpasse largement les procédures manuelles ainsi que les plates-formes existantes basées sur le champ magnétique, permet des procédures interventionnelles endovasculaires en profondeur, et donc actuellement inaccessible, régions du corps humain.
La méthode promet d'élargir les possibilités d'application de diverses procédures médicales, y compris le diagnostic, imagerie et traitements locaux. Entre autres, il pourrait servir à assister les chirurgiens dans les interventions nécessitant les méthodes les moins invasives possibles, y compris le traitement des lésions cérébrales telles qu'un anévrisme ou un accident vasculaire cérébral.