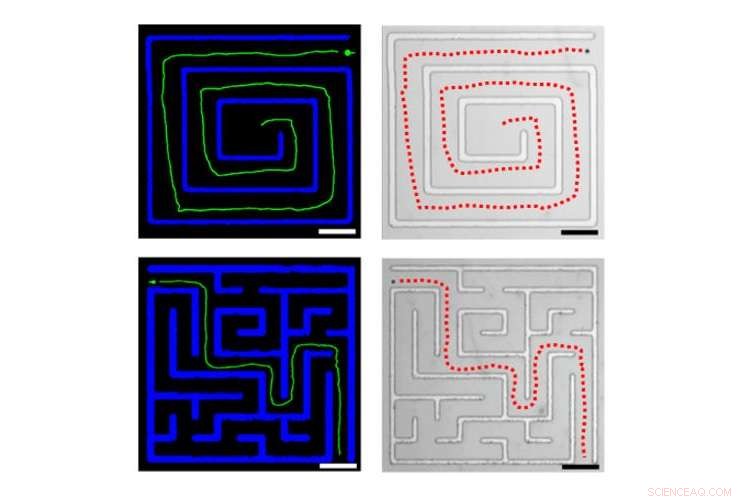
Trajectoires d'un microvéhicule à travers des labyrinthes. Le trajet est planifié par un système d'intelligence artificielle et le microvéhicule est guidé par des champs magnétiques. Crédit :Li et al. ©2017 Société chimique américaine
(Phys.org)—Dans une nouvelle étude, des scientifiques ont développé la version microscopique des véhicules autonomes :un micromoteur sphérique de 5 μm qui navigue de manière autonome à travers le micro-trafic le long d'un micro-labyrinthe pour atteindre sa destination finale. Les chercheurs s'attendent à ce que ces "microvéhicules intelligents" aient des applications potentielles dans des tâches biomédicales, comme l'administration de médicaments aux cellules tumorales tout en évitant les cellules saines.
Les scientifiques, dirigé par Longqiu Li au Harbin Institute of Technology en Chine, et Joseph Wang à l'Université de Californie à San Diego aux États-Unis, ont publié un article sur les microvéhicules intelligents dans un récent numéro de ACS Nano .
"Nous avons intégré l'intelligence artificielle dans un micro/nanrobot, " Li a dit Phys.org . « Nous introduisons un microvéhicule intelligent pour une navigation autonome précise dans des environnements complexes et changeant de manière dynamique grâce à une planification optimale des trajets. Similaires à leurs homologues des grands véhicules, la navigation autonome des microvéhicules implique un mouvement sans collision dans des environnements dynamiques."
Jusqu'à maintenant, les micro et nanomachines ont été restreintes à une navigation utilisant un système de contrôle en boucle fermée, dans lequel les machines ne peuvent se déplacer que le long d'un chemin prédéfini. La nouvelle étude marque la première démonstration de micromachines capables de naviguer de manière autonome dans des complexes, des environnements en évolution dynamique, tels que ceux avec d'autres micromachines en mouvement.
Le processus de navigation autonome comprend trois étapes principales. Une caméra CCD attachée à un microscope prend des photos et les envoie à un processeur d'extraction de caractéristiques, qui identifie les obstacles et construit une carte de l'environnement. La carte est ensuite envoyée en entrée à un planificateur d'Intelligence Artificielle (IA), qui utilise un algorithme de recherche de chemin et une approche de logique floue pour déterminer le chemin sans collision le plus court parmi plusieurs chemins possibles vers la destination. Le planificateur AI envoie ensuite ces directions de voyage à un générateur de champ magnétique, qui oriente un champ magnétique de manière à diriger le microvéhicule le long de la voie sans collision.