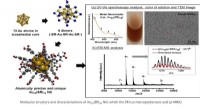
Crédit : Institut de physique de Leiden
Les physiciens de Leyde exploitent l'auto-assemblage de petites particules pour créer un jour des structures fonctionnelles telles que des micro-robots de bas en haut. Maintenant, ils ont fait un pas en avant important en réalisant expérimentalement des joints à l'échelle micrométrique. L'étude est publiée dans Nanoéchelle journal.
Les robots de taille micrométrique ont un grand potentiel par exemple en médecine, car ils peuvent délivrer localement des médicaments ou effectuer une intervention chirurgicale précise. Les scientifiques cherchent donc des moyens de développer des robots à cette échelle miniature. Cependant, lors de la fabrication de versions toujours plus petites d'appareils fonctionnels, on rencontre vite des limites. Par conséquent, La physicienne de Leiden Daniela Kraft travaille dans l'autre sens :de bas en haut au lieu de haut en bas. Elle utilise des particules d'environ un micromètre, appelées colloïdes, comme pièces. En raison de leur petite taille, les colloïdes ont l'avantage supplémentaire de se déplacer en continu dans des directions aléatoires, qui permet aux structures de se construire.
Les articulations
Bien qu'il soit déjà difficile de créer les différentes pièces, telles que les cubes, Triangles, et des haltères - et combinez-les de la manière souhaitée, les objets résultants sont généralement rigides. Si vous rêvez de créer un micro-robot entièrement fonctionnel, il faut aussi des pièces qui permettent le mouvement :les articulations. Maintenant pour la première fois, Kraft et son groupe de recherche ont réussi à fabriquer trois types différents de joints à l'échelle microscopique :des charnières, curseurs et rotules. Ils publient leurs découvertes à l'échelle nanométrique.
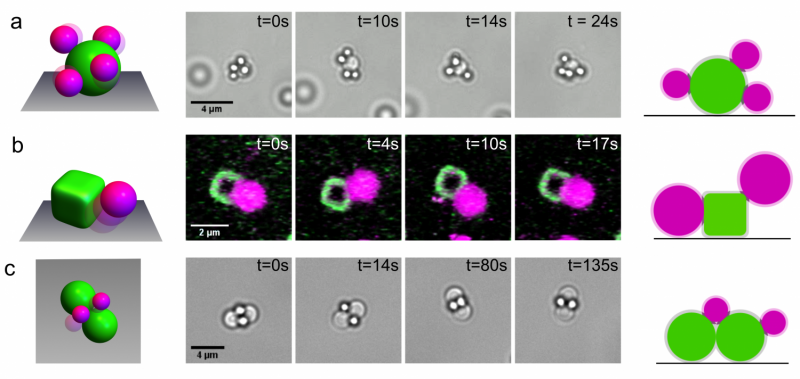
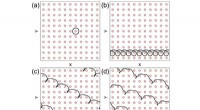
Trois types différents de joints de taille micrométrique. a) Les rotules confèrent une liberté de mouvement sur 360 degrés pour les sphères violettes. b) Joints coulissants :la sphère violette ne peut glisser que sur un côté du cube. c) Articulations :les sphères violettes ne peuvent tourner qu'autour du centre de l'haltère. Crédit : Institut de physique de Leiden
ADN
Pour donner à leurs articulations la mobilité nécessaire, les chercheurs relient les colloïdes par des linkers d'ADN. Au lieu d'attacher les linkers à un endroit fixe sur le colloïde, ils se déplacent librement sur la surface. Kraft maintient la densité relativement faible à environ un millier de lieurs d'ADN par micromètre carré sur la surface du colloïde. C'est suffisant pour intégrer la fonctionnalité commune, tout en n'étant pas trop nombreux pour arrêter le système.
Degrés de liberté
Dans le monde macroscopique, les joints ne créent pas seulement une connexion mobile, ils fournissent également des fonctionnalités en contraignant le mouvement dans certaines directions. Une charnière de porte, par exemple, ne permet à la porte de tourner que dans une seule direction. Pour conférer de tels degrés de liberté spécifiques et donc une fonctionnalité à leurs articulations microscopiques, les physiciens ont exploité le fait que les colloïdes s'attachent le plus fort au contact maximum. Une sphère reliée à une particule cubique ne peut que glisser le long de son côté, parce que la zone de contact diminuera si elle tourne au coin de la rue ; cela en fait un joint coulissant (Figure 1b). Les sphères reliées à la taille d'un haltère ne peuvent orbiter qu'autour du centre, car ils ressentent un contact maximal s'ils touchent les deux moitiés de l'haltère (Figure 1c). Ceci fournit une fonction de charnière. Troisièmement, les colloïdes sphériques peuvent être utilisés comme joints à rotule car les particules attachées ont la liberté de se déplacer dans toutes les directions (Figure 1a). Ces trois types de joints microscopiques transforment des structures colloïdales rigides en structures flexibles qui constituent la base des futurs microrobots auto-construits.