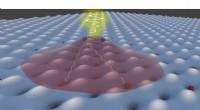
Le modèle de vision stéréo binoculaire. Crédit :Optics Express (2022). DOI :10.1364/OE.470391
Les services basés sur la localisation deviennent de plus en plus importants dans les environnements intérieurs avec le développement des technologies Internet des objets (IoT). Le système de positionnement par la lumière visible (VLP) offre un grand potentiel en raison de son immunité aux interférences électromagnétiques induites par les radiofréquences, d'un spectre libre et sans restriction et d'un niveau de sécurité beaucoup plus élevé.
Récemment, de nombreux travaux de recherche sur les VLP en ligne de mire (LOS) ont été démontrés avec une grande précision à des coûts très faibles. Cependant, pour LOS VLP, le blocage et la duplication sont un problème majeur ; et il faut un grand nombre de LED. Peu de méthodes pour résoudre ce problème ont été étudiées.
Dans une étude publiée dans Optics Express , le groupe du Dr Lin Bangjiang de l'Institut de recherche sur la structure de la matière du Fujian de l'Académie chinoise des sciences a proposé un système VLP sans ligne de visée (NLOS) utilisant une caméra binoculaire et une seule diode électroluminescente (LED) . Il peut réaliser un positionnement 3D de haute précision d'une posture arbitraire par les lumières réfléchies par le sol.
Les chercheurs ont proposé un modèle de système composé de deux modules fonctionnels :un module de communication par caméra optique (OCC) NLOS et un module de vision stéréo binoculaire. Le premier utilise les réflexions pour recevoir les informations de coordonnées de la LED par un modèle de récupération de signal OCC amélioré. Et ce dernier estime la position de la caméra par un algorithme d'estimation de position binoculaire proposé, qui est basé sur les principes de la vision stéréo binoculaire.
Ils ont ensuite proposé un algorithme de compensation d'erreur pour optimiser l'erreur du système sur l'axe z, qui est le problème clé de l'estimation de profondeur pour la caméra binoculaire que l'erreur sur l'axe z est bien supérieure à celle sur les x et y axes.
De plus, les chercheurs ont conçu un banc d'essai expérimental et ont choisi un microcontrôleur STM32 pour piloter une LED. Au récepteur, ils ont utilisé une caméra binoculaire pour capturer les lumières réfléchies par le sol à deux modes d'exposition différents (un long et un court).
Ils ont obtenu la position de la LED par le module NLOS OCC en utilisant l'image à exposition courte et ont obtenu les coordonnées de pixel de la projection de la LED réfléchie par le sol dans l'image à exposition longue. Une unité de mesure inertielle est fixée avec la caméra binoculaire pour mesurer sa pose.
À l'aide de ces informations, les chercheurs ont calculé l'erreur entre la valeur d'estimation et la valeur mesurée de la position de la caméra.
Cette étude surmonte le défi de l'ombrage/blocage des liaisons LOS, réalise un positionnement d'attitude arbitraire 3D avec le nombre minimum de balises (une seule LED) et améliore considérablement la praticabilité du VLP. Plate-forme de ravitaillement en vol autonome pour drones basés sur la vision binoculaire :les pilotes ne sont plus nécessaires