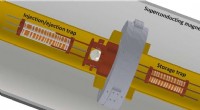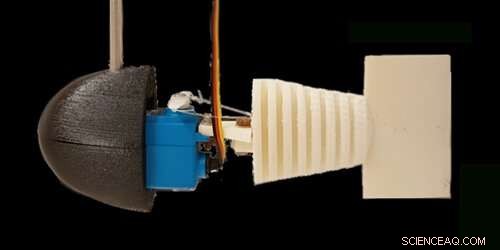
L'unité robotique simple des chercheurs. Le matériau blanc est imprimé en 3D à l'aide de polymères déformables. Un servomoteur (bleu) entraîne deux câbles qui assurent la déformation du robot. La partie sombre est imprimée en 3D dans un matériau solide. Crédit :Sanchez-Rodriguez et al.
Au cours des dernières décennies, les roboticiens ont développé une variété de robots inspirés par la nature, humains et animaux. Pour imiter efficacement les animaux ou les humains, cependant, ces robots ne doivent pas seulement leur ressembler; ils devraient également se déplacer de manière similaire.
Des chercheurs de l'Université Côte d'Azur-CNRS ont récemment mis en place un nouveau mécanisme bio-inspiré pour réaliser une nage de poisson dans des robots. Ce mécanisme, présenté dans un article publié dans Lettres d'examen physique , repose sur ce qu'on appelle la proprioception, la capacité des animaux à recueillir des informations sur la position de leur corps, mouvement et accélération.
"Avec mes collègues M. Gazzola et L. Mahadevan, nous avons découvert une loi générale qui prédit la vitesse des nageurs sous-marins macroscopiques en fonction de la démarche de nage, c'est à dire., l'amplitude et la fréquence du coup d'aileron/queue, " Médéric Argentine, l'un des chercheurs qui a mené l'étude, Raconté Phys.org . "Nos travaux ont fourni une explication rationnelle de cette loi d'échelle qui fonctionnait sur des nageurs de quelques centimètres de longueur aux plus gros animaux, comme les baleines bleues (30m)."
Pour tester leur modèle, les chercheurs voulaient collecter des données cinématiques d'ondulation de la queue, qui n'a pas encore été mesurée chez les animaux vivants. En outre, ils étaient curieux de comprendre quels mécanismes permettent à un nageur donné de sélectionner l'amplitude et la fréquence du mouvement de sa queue. Pour y parvenir, ils ont construit un petit robot conforme avec un corps qui peut se déformer biomimétiquement.
« Cette plateforme robotique nous a permis de valider notre loi d'échelle, mais aussi d'explorer des scénarios pour la sélection de la cinématique d'ondulation, " a déclaré l'Argentine. " Il semblait naturel que la proprioception soit un excellent candidat, car c'est un sens (parfois appelé sixième sens) qui évalue la déformation du corps, son accélération ou la force ressentie. Dans notre récent article, nous nous sommes demandé si une boucle de rétroaction contrôlée par la proprioception pouvait déclencher la locomotion et nos travaux ont démontré qu'en effet les capteurs proprioceptifs peuvent induire une nage agréable et régulière."
Crédit :Sanchez-Rodriguez et al.
Le principal avantage du mécanisme proprioceptif introduit par l'Argentine et ses collègues est qu'il permet aux nageurs robotisés d'adapter leur ondulation à leur environnement environnant, tout comme beaucoup de poissons. En réalité, la plupart des poissons ont des lignes latérales qui peuvent mesurer la pression du fluide sur leur corps, leur permettant d'intégrer les sens proprioceptifs.
"Notre idée était d'exploiter le retour de la force ressentie du robot à la déformation de la queue, " a déclaré l'Argentine. " Cette approche est donc simple, robuste et pourrait expliquer le choix des allures de nage."
Les chercheurs ont testé le mécanisme proprioceptif qu'ils ont développé sur un véritable robot biomimétique, en comparant ses performances avec celles obtenues lors de l'utilisation d'un modèle générique de nage robotique. Leurs découvertes étaient très prometteuses, car leur mécanisme se comparait favorablement au modèle générique et permettait une nage semblable à celle d'un poisson dans le robot.
"La proprioception peut aussi être la première étape pour créer des robots ondulants qui adaptent automatiquement leur cinématique à l'environnement, " a déclaré l'Argentine. "Nos travaux ont démontré que ce simple couplage de la proprioception au mouvement de la queue pouvait déclencher une instabilité qui fait que la queue ondule et pousse le nageur."
À l'avenir, le mécanisme proprioceptif imaginé par cette équipe de chercheurs pourrait permettre le développement de robots aquatiques capables de se déplacer plus efficacement dans l'eau. Pendant ce temps, L'Argentine et ses collègues continueront à travailler sur leur robot pour améliorer ses capacités.
"Nous apprenons actuellement au robot à nager en utilisant des techniques d'apprentissage automatique, " a déclaré l'Argentine. "Nos premiers résultats nous donnent beaucoup de confiance que nous devrions être capables de construire/concevoir des robots ondulants qui nagent à l'aide de l'IA."
© 2021 Réseau Science X