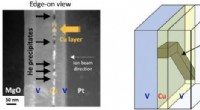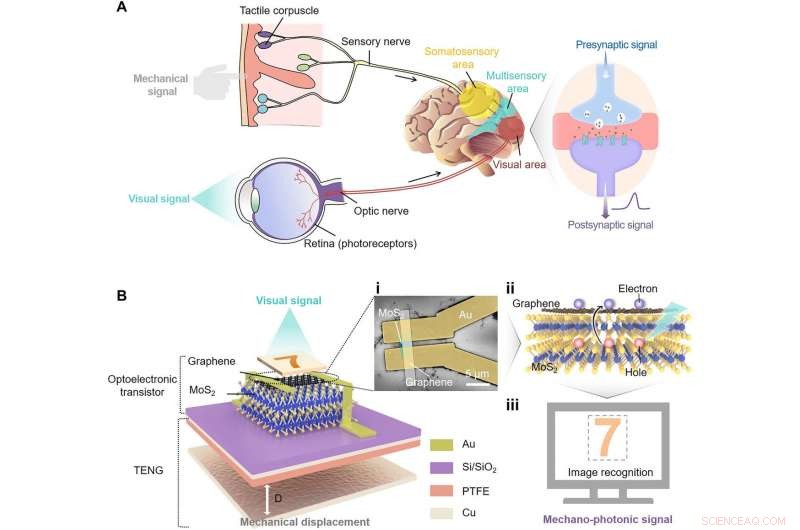
Neurones biologiques tactiles/visuels et synapse artificielle mécano-photonique. (A) Illustrations schématiques du système sensoriel tactile/visuel biologique. (B) Schéma de principe de la synapse artificielle mécano-photonique basée sur l'hétérostructure graphène/MoS2 (Gr/MoS2). (i) Image au microscope électronique à balayage (MEB) vue de dessus du transistor optoélectronique ; barre d'échelle, 5 µm. La zone cyan indique le flocon de MoS2, tandis que la bande blanche est du graphène. (ii) Illustration du transfert/échange de charges pour l'hétérostructure Gr/MoS2. (iii) Sortir des signaux mécano-photoniques de la synapse artificielle pour la reconnaissance d'images. Crédit :Avancées scientifiques, doi:10.1126/sciadv.abd9117
Les systèmes neuronaux artificiels multifonctionnels et diversifiés peuvent incorporer une plasticité multimodale, mémoire et fonctions d'apprentissage supervisé pour aider le calcul neuromorphique. Dans un nouveau rapport, Jinran Yu et une équipe de recherche en nanoénergie, nanosciences et science des matériaux en Chine et aux États-Unis., a présenté une synapse artificielle mécano-photonique bioinspirée avec une plasticité mécanique et optique synergique. L'équipe a utilisé un transistor optoélectronique en graphène/disulfure de molybdène (MoS
Réseaux de neurones inspirés du cerveau.
Le cerveau humain peut intégrer la cognition, tâches d'apprentissage et de mémoire via l'audition, visuel, interactions olfactives et somatosensorielles. Ce processus est difficile à imiter en utilisant des architectures von Neumann conventionnelles qui nécessitent des fonctions sophistiquées supplémentaires. Les réseaux de neurones inspirés du cerveau sont constitués de divers dispositifs synaptiques pour transmettre des informations et traiter à l'aide du poids synaptique. La synapse photonique émergente combine la modulation et le calcul neuromorphiques optiques et électriques pour offrir une option favorable avec une bande passante élevée, vitesse rapide et faible diaphonie pour réduire considérablement la consommation d'énergie. Mouvements biomécaniques incluant le toucher, Le clignement des yeux et l'agitation des bras sont d'autres déclencheurs ou signaux interactifs omniprésents pour faire fonctionner l'électronique pendant la plastification artificielle des synapses. Dans ce travail, Yu et al. a présenté une synapse artificielle mécano-photonique avec une plasticité mécanique et optique synergique. Le dispositif contenait un transistor optoélectronique et un nanogénérateur triboélectrique intégré (TENG) en mode de séparation de contact. Les synapses artificielles mécano-optiques ont un énorme potentiel fonctionnel en tant qu'interfaces optoélectroniques interactives, rétines synthétiques et robots intelligents.
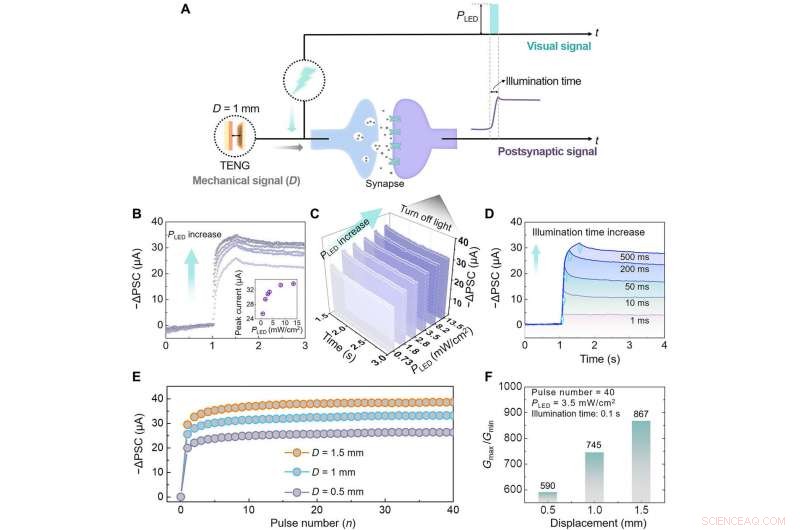
Effet synergique du signal mécanique et visuel pour la synapse artificielle mécano-photonique. (A) Diagramme schématique du signal mécanique et optique synergique pour la synapse artificielle mécano-photonique. (B) −ΔPSCs sous différentes PLED à un D fixe de 1 mm, VD =1 V, et une largeur d'impulsion lumineuse de 0,5 s. Encart :le courant de crête de ΔPSC par rapport à PLED. (C) −ΔPSCs sous différents PLED lorsque la lumière est éteinte. (D) -ΔPSCs à différentes largeurs d'impulsions lumineuses (PLED =3,5 mW cm-2 et D =1 mm). (E) Les −ΔPSC sous 40 impulsions lumineuses consécutives sous différents déplacements (PLED =3,5 mW cm−2 ; largeur d'impulsion, 50 ms ; D =0,5, 1, et 1,5 mm). (F) Les marges de conductance (Gmax/Gmin) en fonction du déplacement. Crédit :Avancées scientifiques, doi:10.1126/sciadv.abd9117
Le cerveau humain et ses sensations biomécaniques et visuelles associées sont essentiels pour acquérir des informations somatosensorielles et visuelles. Le cerveau contient une variété de neurones qui reçoivent des signaux interactifs via des modes variés pour mettre en œuvre le calcul neuromorphique dans la zone d'association multisensorielle. Synapses à partir de points de connexion importants entre deux neurones adjacents lors des transmissions d'informations neuronales. Yu et al. ont été bioinspirés par le cerveau et le système nerveux pour développer une synapse artificielle mécano-photonique avec une plasticité mécanique et optique synergique. La synapse artificielle mécano-photonique comprenait un transistor optoélectronique et un TENG (nanogénérateur triboélectrique) intégré. Lors des expérimentations, l'équipe a utilisé le dépôt chimique en phase vapeur pour déposer du graphène monocouche sur le transistor optoélectronique, qu'ils ont ensuite empilés sur un sulfure de molybdène multicouche (MoS
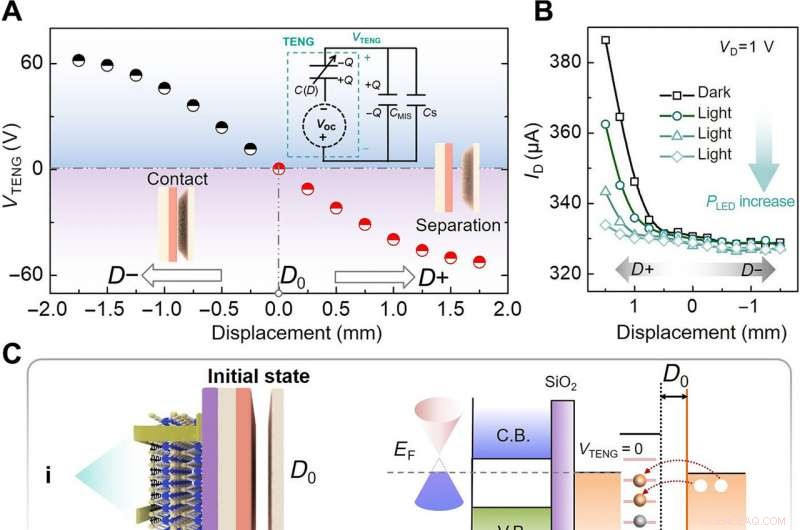
Transistor mécano-optoélectronique basé sur l'hétérostructure Gr/MoS2 et mécanisme de fonctionnement correspondant. (A) La tension de sortie TENG (VTENG) par rapport au déplacement (D). En médaillon :schéma de circuit équivalent pour la caractérisation VTENG. (B) Courbes de transfert (ID par rapport à D) dans l'obscurité et sous différentes intensités de lumière verte (PLED). (C) Mécanisme de fonctionnement du transistor mécano-optoélectronique basé sur l'hétérostructure Gr/MoS2. Illustrations schématiques des principes de fonctionnement et du diagramme de bande d'énergie correspondant à (i) état initial de bande plate, (ii) état de séparation (D+), et (iii) état de contact (D-). Crédit :Avancées scientifiques, doi:10.1126/sciadv.abd9117
Test du dispositif et caractérisation mécano-optique.
Pour tester la praticité du déclenchement de potentiel triboélectrique, l'équipe a caractérisé la tension de sortie du TENG en fonction du déplacement mécanique à l'aide d'un circuit de test, où ils ont connecté le condensateur diélectrique du transistor et le condensateur du système de test avec TENG en parallèle. En optimisant le MoS
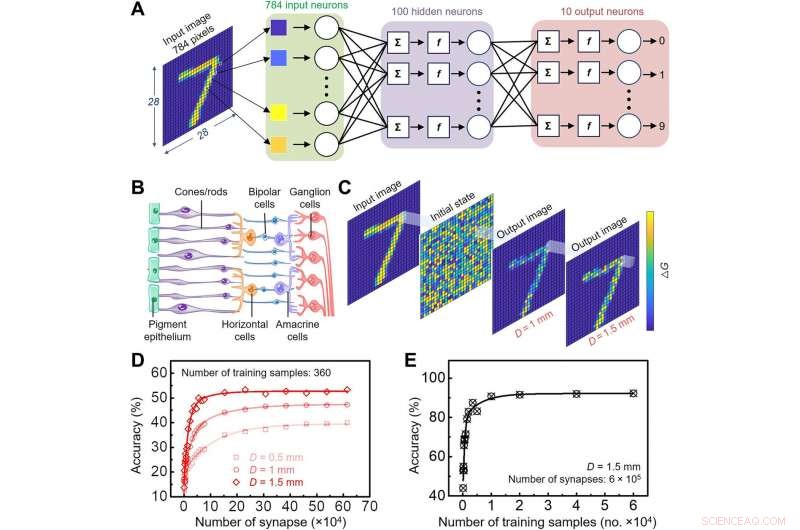
Simulation d'ANN pour la reconnaissance d'images par la synapse artificielle mécano-photonique. (A) Illustration schématique de l'ANN simulé avec 784 neurones d'entrée, 100 neurones cachés, et 10 neurones de sortie. (B) Illustration schématique du réseau neuronal rétinien. (C) Exemples d'image cartographique obtenue à partir d'ANN :image d'entrée, image de l'état initial, image de sortie à D =1 mm, et image de sortie à D =1,5 mm. (D) Précision de reconnaissance de la stimulation du signal visuel avec différents nombres de synapses. (E) Précision de reconnaissance de la stimulation du signal visuel avec différents nombres d'échantillons d'entraînement. Crédit :Avancées scientifiques, doi:10.1126/sciadv.abd9117
Conductivité du canal et plasticité synaptique à long terme.
L'équipe a ensuite régulé la conductivité du canal du transistor à l'aide d'un déplacement mécanique et d'un éclairage lumineux ; fondamental pour la plasticité multimodale dans les synapses artificielles mécano-photoniques. Ils ont maintenu le courant post-synaptique basal (CSP) stable à différents niveaux sous différents états de déplacement en tant que pré-requis pour accomplir des photoréponses synaptiques. Le travail a montré les effets des comportements électriques modulés par le potentiel triboélectrique et des comportements optoélectriques sur le courant post-synaptique. Ils ont conservé la synapse artificielle mécano-photonique pendant plus d'une heure sans modifications pour fournir des preuves de la mise en œuvre du module optique et mécanique synergique pour la plasticité synaptique à long terme. L'équipe a attribué la diminution du courant postsynaptique (PSC) à l'affaiblissement de la densité des trous dans le graphène utilisé dans la configuration, d'autre part, ils ont attribué les PSC persistants à des états localisés dans MoS
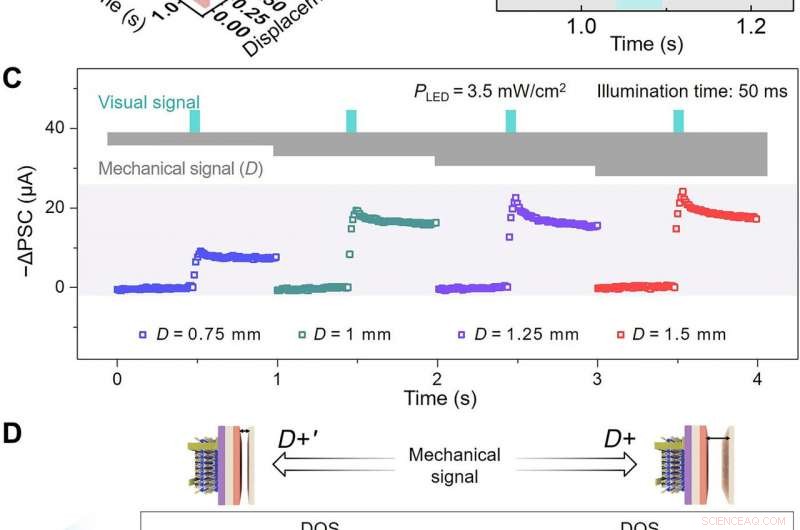
Synapse artificielle mécano-photonique basée sur l'hétérostructure Gr/MoS2. (A) Évaluation en temps réel de la PSC initiale dans l'obscurité ; D varie de 0 à 1,5 mm. (B) Courant postsynaptique photo-activé (-ΔPSC) de la synapse artificielle à D =1 mm et PLED =3,5 mW cm-2 avec une largeur d'impulsion lumineuse à 50 ms. (C) −ΔPSC sous l'effet synergique de l'éclairement lumineux et des différents D (de 0,75 à 1,5 mm) à VD =1 V. En haut :Le schéma de principe des signaux présynaptiques mécaniques et visuels. Le PLED est fixé à 3,5 mW cm−2 avec une largeur d'impulsion lumineuse à 50 ms. (D) Illustrations schématiques de la densité d'états et de la distribution des porteurs dans l'hétérostructure Gr/MoS2 sous éclairage lumineux et après éclairage lumineux (région de photocourant persistant) à deux états de déplacement différents (D+ et D+′). Crédit :Avancées scientifiques, doi:10.1126/sciadv.abd9117
Yu et al. examiné en outre les effets synergiques de la synapse artificielle sous des entrées d'impulsions lumineuses incorporant diverses informations spatio-temporelles. Ils ont ensuite simulé un réseau de neurones artificiels (ANN) multicouche basé sur la perception en utilisant des caractéristiques synaptiques typiques pour une fonction d'apprentissage supervisé à l'aide de l'ensemble de données d'images d'écriture manuscrite du National Institute of Standards and Technology (MNIST). Dans l'ANN, Yu et al. inclus 28 x 28 neurones d'entrée, 100 neurones cachés, et 10 neurones de sortie entièrement connectés via des poids synaptiques. Le total de 784 neurones d'entrée correspondait à une image MNIST 28 x 28 et les 10 neurones de sortie correspondaient à 10 nombres arabes de zéro à neuf. L'équipe a construit l'ANN bio-inspiré de la rétine humaine, qui, au contraire, contient des milliards de cellules nerveuses pour former un réseau complexe à trois couches. Ils ont ensuite montré comment améliorer la périodicité, la stabilité et la répétabilité de l'appareil ont amélioré la simulation de l'ANN pour la reconnaissance d'images.
Perspectives
De cette façon, Jinran Yu et ses collègues ont développé une synapse artificielle mécano-photonique avec une plasticité synaptique multimodale synergique. L'équipe a utilisé le potentiel triboélectrique pour piloter le transistor synaptique et réguler l'échange de transfert de charge dans l'hétérostructure afin de faciliter les photocourants post-synaptiques, photoconductivité persistante et photosensibilité. La configuration a également permis la mémoire à long terme et la facilitation neuronale consécutive. L'équipe a ensuite simulé un réseau de neurones artificiels (ANN) pour montrer la faisabilité de la plastification mécanique pour promouvoir la précision de la reconnaissance d'images. Les travaux ouvriront la voie au développement de dispositifs neuromorphiques multifonctionnels et interactifs.
© 2021 Réseau Science X