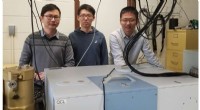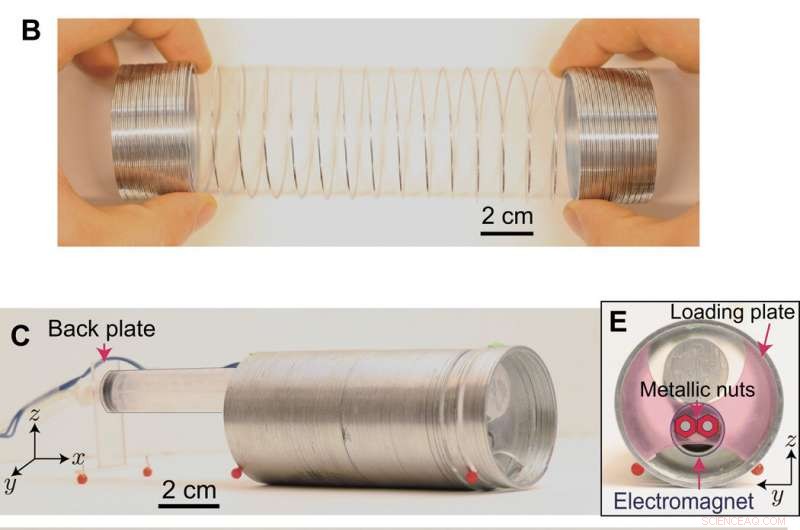
Le robot Slinky. (A) Schéma montrant le mécanisme locomoteur d'un ver de terre basé sur des ondes péristaltiques rétrogrades (c'est-à-dire, ondes qui se propagent dans le sens opposé à la locomotion). (B) Image de Slinky métallique utilisé dans cette étude. (C et D) Photos de notre robot Slinky (C) avant et (D) après l'allongement de l'actionneur pneumatique. (E) Vue de face du Slinky-robot montrant l'électro-aimant. A noter que plusieurs sphères en plastique rouge sont collées sur le Slinky pour l'empêcher de rouler. Crédit photo :Bolei Deng, Université de Harvard. Crédit :Avancées scientifiques, doi:10.1126/sciadv.aaz1166
Les scientifiques ont récemment exploré les propriétés uniques des ondes non linéaires pour faciliter un large éventail d'applications, notamment l'atténuation des impacts, transmission asymétrique, commutation et mise au point. Dans une nouvelle étude maintenant publiée sur Avancées scientifiques , Bolei Deng et une équipe de chercheurs scientifiques à Harvard, Le CNRS et le Wyss Institute for Biologically Inspired Engineering aux États-Unis et en France ont exploité la propagation des ondes non linéaires pour faire ramper des structures flexibles. Ils ont combiné des méthodes expérimentales et théoriques bioinspirées pour montrer comment une telle locomotion par impulsions pouvait atteindre une efficacité maximale lorsque les impulsions initiées étaient des solitons (onde solitaire). La machine simple développée dans le travail pouvait se déplacer sur un large éventail de surfaces et se diriger vers l'avant. L'étude a élargi la variété des applications possibles avec les ondes non linéaires pour offrir une nouvelle plate-forme pour les machines flexibles.
Les structures flexibles capables de grandes déformations suscitent l'intérêt pour la bio-ingénierie en raison de leur réponse statique intrigante et de leur capacité à supporter des ondes élastiques de grande amplitude. En contrôlant soigneusement leur géométrie, le paysage énergétique élastique des systèmes hautement déformables peut être conçu pour propager une variété d'ondes non linéaires, y compris des solitons vectoriels, ondes de transition et impulsions de raréfaction. Le comportement dynamique de telles structures démontre une physique très riche, tout en offrant de nouvelles opportunités pour manipuler la propagation des signaux mécaniques. De tels mécanismes peuvent permettre une propagation unidirectionnelle, guidage d'onde, logique mécanique et atténuation, entre autres applications.
Dans ce travail, Deng et al. ont été inspirés par le mouvement biologique rétrograde des ondes péristaltiques chez les vers de terre et la capacité des ondes élastiques linéaires à générer un mouvement dans les moteurs à ultrasons. L'équipe a montré la propagation d'ondes élastiques non linéaires dans des structures flexibles pour offrir des opportunités de locomotion. Comme preuve de concept, ils se sont concentrés sur un Slinky - et l'ont utilisé pour créer un robot à impulsions capable de se propulser. Ils ont construit la machine simple en connectant le Slinky à un actionneur pneumatique. L'équipe a utilisé un électro-aimant et une plaque intégrée entre les boucles pour initier des impulsions non linéaires à se propager le long de l'appareil de l'avant vers l'arrière, permettant à la directionnalité de l'impulsion de dicter au robot simple d'avancer. Les résultats ont indiqué que l'efficacité d'une telle locomotion à impulsions était optimale avec des solitons - des impulsions non linéaires de grande amplitude avec une vitesse constante et une forme stable tout au long de la propagation. L'étude a élargi les applications des ondes solitaires (solitons) tout en montrant comment elles peuvent être explorées en tant que moteurs sous-jacents simples pour aider les machines flexibles à se déplacer.
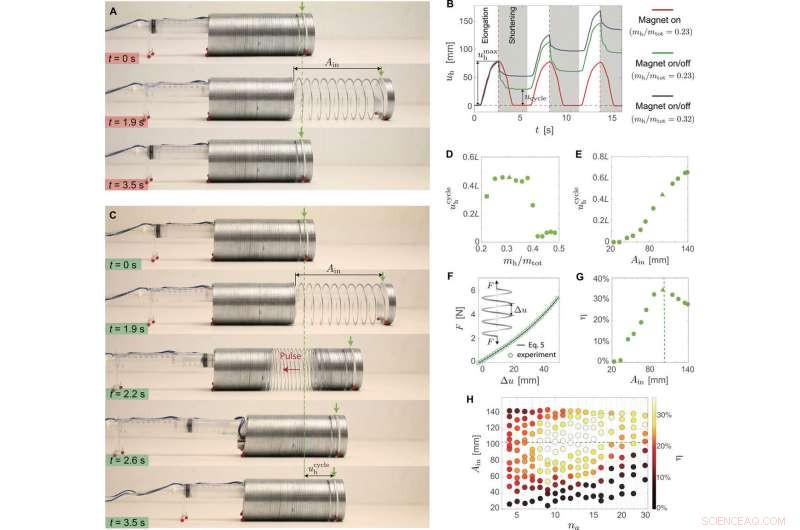
Performances du Slinky-robot. (A) Instantanés pris lors d'un test dans lequel nous étendons les 10 boucles avant à Ain =100 mm tout en gardant l'électro-aimant allumé. (B) Déplacement de la tête pendant trois cycles pour des tests dans lesquels (i) mh/mtot =0,23 et on maintient l'électro-aimant allumé (ligne rouge), (ii) mh/mtot =0,23 et on éteint l'électroaimant après étirement (ligne verte), et (iii) mh/mtot =0,32 et on éteint l'électro-aimant après étirement (ligne bleue). (C) Instantanés pris lors d'un test dans lequel Ain =100 mm et nous éteignons l'électro-aimant après avoir étiré les boucles avant. (D) Evolution de u cycle h en fonction de mh/mtot pour des tests où Ain =100 mm. Les marqueurs carré et triangulaire correspondent à mh/mtot =0,23 et 0,32, respectivement. (E) Evolution de u cycle h en fonction de Ain pour des tests où mh/mtot =0,32. Le repère triangulaire correspond à Ain =100 mm. (F) Réponse statique du Slinky telle que mesurée dans un test uniaxial. (G) Evolution de en fonction de Ain pour des tests où mh/mtot =0,32. Les repères triangulaires correspondent à Ain =100 mm. La ligne pointillée verte correspond à l'amplitude du soliton supporté, Comme. (H) Evolution de en fonction de na et Ain pour des tests où mh/mtot =0,32. Crédit photo :Bolei Deng, Université de Harvard. Crédit :Avancées scientifiques, doi:10.1126/sciadv.aaz1166
Pour créer le robot Slinky, Deng et al. utilisé un Slinky en métal d'une longueur de 50 mm et 90 boucles, pour ensuite tester et comprendre comment explorer sa flexibilité intrinsèque, et créer une machine simple capable de mouvement. Ils ont connecté deux slinkies en série (100 mm, 180 boucles) pour une stratégie d'actionnement simple basée sur un actionneur pneumatique, un électro-aimant et trois plaques acryliques. Ils pourraient étirer et raccourcir la configuration à l'aide de l'actionneur pneumatique tout en maintenant l'électro-aimant allumé. L'équipe a testé la réponse de la machine en la plaçant sur une surface lisse et en la surveillant avec une caméra haute vitesse. Deng et al. puis éteint le champ magnétique pour tenter de briser la symétrie et faire ramper la machine. Ils n'ont pas observé d'onde réfléchie dans le Slinky en raison de la grande dissipation d'énergie lors de la collision des boucles et ont plutôt observé un mouvement vers l'avant clair du robot. L'équipe a donc exploré la directionnalité introduite par les ondes élastiques pour faire bouger le robot, même en présence de coefficients de frottement identiques.
Propagation d'ondes non linéaires. Un slinky avec 90 boucles est soulevé du substrat et soutenu par une tige en plastique pour minimiser le frottement. En pré-étirant 10 boucles près de l'avant et en éteignant l'électro-aimant magnétique, nous initions des ondes élastiques qui se propagent vers l'arrière. Les marqueurs verts sont utilisés pour suivre le déplacement de chaque autre boucle. Voir le film complet sur Credit:Science Advances, doi:10.1126/sciadv.aaz1166
Les tentatives pour faire ramper la machine flexible via des impulsions élastiques ont cependant révélé que les conditions expérimentales étaient sous-optimales. Par exemple, ils ont remarqué un retour en arrière immédiatement après avoir éteint l'électro-aimant. Pour limiter ce mouvement, Deng et al. augmenté la masse à la tête du robot Slinky tout en optimisant la valeur pour identifier une portée optimale. Le Slinky a maintenu 10 boucles entre les plaques avant et de chargement dans la configuration. L'équipe a désigné la distance maximale entre le chargement et les plaques avant comme A
Pour ces expériences, ils se sont concentrés sur un seul Slinky et ont surveillé la position des marqueurs verts situés à chaque autre boucle. Ils ont ensuite initié des ondes élastiques qui se sont propagées vers l'arrière en pré-étirant 10 boucles près de l'avant et en éteignant l'électro-aimant. Les tests ont permis à l'équipe de recueillir des informations plus approfondies sur la propagation des impulsions en surveillant le déplacement de chaque boucle. Les scientifiques ont réalisé deux caractéristiques principales du robot; 1) les ondes se propageant vers l'arrière ont déplacé le centre de masse du Slinky vers l'avant et 2) le Slinky a soutenu la propagation d'ondes solitaires de grande amplitude.
Pour na =4 les impulsions sont trop fortes, et leur énergie se dissipe via des collisions entre les boucles. Pour na =30 les impulsions sont trop faibles et se propagent à peine. Voir le film complet sur Credit:Science Advances, doi:10.1126/sciadv.aaz1166
Pour mieux comprendre les résultats expérimentaux, Deng et al. développé un modèle mathématique qui représente la masse et l'élasticité d'une boucle individuelle. Les résultats calculés correspondaient extrêmement bien aux résultats expérimentaux et le modèle a confirmé les observations expérimentales. L'analyse a en outre confirmé que l'efficacité du robot Slinky était maximale lorsque les vagues initiées étaient des solitons. La nature non dispersive et la compacité des impulsions solitaires les rendaient extrêmement efficaces pour transférer l'énergie fournie par l'actionneur pneumatique en mouvement afin d'obtenir la locomotion à impulsions la plus efficace.
De cette façon, Deng et al. a montré comment les solitons à propagation arrière pouvaient efficacement faire avancer un robot Slinky. Même si les organismes sans membres ont déjà inspiré des ingénieurs bioinspirés pour concevoir une variété de robots, l'équipe pense que ce travail est le premier système robotique à s'appuyer sur des impulsions élastiques pour se déplacer. Les principes présentés dans l'étude étaient différents de ceux utilisés par les moteurs à ultrasons, puisque le robot flexible Slinky utilisait des ondes pulsées non linéaires pour modifier la position du centre de masse, les moteurs à ultrasons sont en revanche alimentés par des ondes sinusoïdales linéaires. L'équipe s'est uniquement concentrée sur le crawl rectiligne vers l'avant dans ce travail, mais ils peuvent explorer la flexibilité du Slinky pour réaliser une gamme de mouvements.
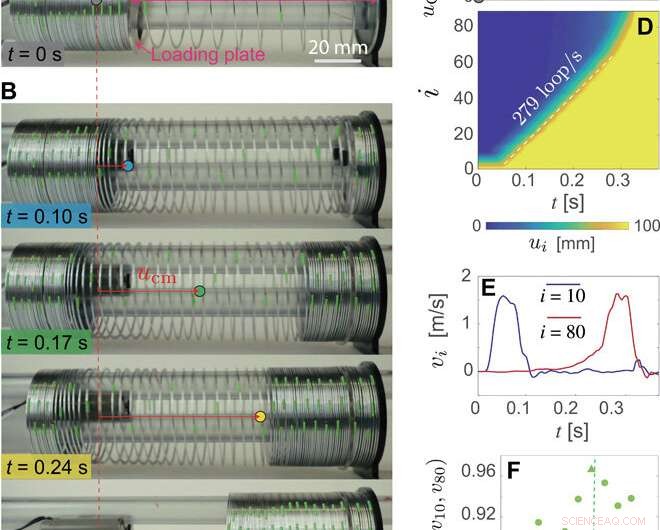
Propagation des ondes dans le Slinky. (A) Configuration expérimentale utilisée pour tester la propagation des impulsions dans le Slinky métallique. A t =0 s, na =10 boucles entre le plateau de chargement et l'avant du Slinky sont tendues à Ain =100 mm. (B) Instantanés de la propagation de l'impulsion dans le Slinky à t =0,10, 0,17, 0,24, et 0,34 s. Les marqueurs circulaires indiquent les positions du centre de masse du Slinky. (C) Déplacement du centre de masse du Slinky, uCM, en fonction du temps. Les marqueurs circulaires correspondent aux points temporels considérés en (A) et (B). (D) Diagramme de déplacement spatio-temporel de l'impulsion de propagation. (E) Signaux de vitesse mesurés aux 10e et 80e boucles. (F) Evolution de la corrélation croisée de v10 (t) et v80 (t) en fonction de l'amplitude d'entrée Ain. Le repère triangulaire correspond à Ain =100 mm. La ligne pointillée verte correspond à l'amplitude du soliton supporté, Comme, prédit par les équations dérivées de l'étude. Crédit photo :Bolei Deng, Université de Harvard. Crédit :Avancées scientifiques, doi:10.1126/sciadv.aaz1166
L'équipe compte ensuite diriger le robot en tournant la dernière boucle à l'arrière de l'appareil et contrôler l'angle de braquage, tout en mettant l'accent sur la possibilité existante de déplacer le robot sur une large gamme de surfaces. Bien que Deng et al. utilisé uniquement un Slinky pour réaliser la locomotion par impulsions dans ce travail, les principes sont généraux et peuvent être étendus à une large gamme de systèmes extensibles à toutes les échelles pour ouvrir des voies pour les robots microscopiques adaptés aux applications médicales.
© 2020 Réseau Science X