Un serpent à nez de pelle occidentale se déplace à travers un ensemble de chevilles en caoutchouc sensibles à la force. Les piquets ont modifié la direction du voyage des serpents, mais n'ont pas modifié la forme d'onde qu'ils avaient l'habitude de se déplacer. Crédit :Allison Carter, Géorgie Tech
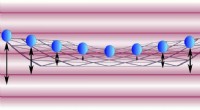
Les serpents du désert glissant sur le sable la nuit peuvent rencontrer des obstacles tels que des plantes ou des brindilles qui modifient la direction de leur déplacement. Tout en étudiant ce mouvement pour apprendre comment les animaux sans membres contrôlent leur corps dans de tels environnements, les chercheurs ont découvert que les serpents entrant en collision avec ces obstacles imitent les aspects de la lumière ou des particules subatomiques lorsqu'ils rencontrent un réseau de diffraction.
L'effet de cette "diffraction mécanique" a permis aux chercheurs d'observer comment les trajectoires des serpents étaient modifiées par des mécanismes passifs régis par la dynamique squelettique et musculaire des ondes corporelles se propageant chez les animaux. Les chercheurs ont étudié des serpents vivants alors qu'ils se faufilaient à travers un obstacle composé de six chevilles rigides sensibles à la force qui déformaient le corps des animaux, changer leurs chemins de manière prévisible.
Les résultats, décrit le 25 février dans le journal Actes de l'Académie nationale des sciences , indiquent que les couleuvres à nez plat de l'Ouest (Chionactis occipitalis) ne changent pas délibérément de direction lorsqu'elles rencontrent des obstacles en courant sur le sable. Comprendre le mouvement de ces animaux sans membres pourrait aider les ingénieurs à améliorer le contrôle des robots autonomes de recherche et de sauvetage conçus pour opérer sur le sable, l'herbe et d'autres environnements complexes.
"L'idée derrière la dynamique passive est qu'il y a des changements de forme d'onde effectués par l'animal qui sont entièrement conduits par les propriétés passives de leur corps, " dit Perrin Schiebel, un doctorat récent. diplômé de l'École de physique du Georgia Institute of Technology. "Au lieu d'envoyer un signal pour activer un muscle, l'interaction des corps des serpents avec l'environnement extérieur est ce qui provoque le changement de forme. Les forces des obstacles poussent les corps des serpents dans une nouvelle forme."
Le serpent coloré au nez de pelle utilise normalement une onde sinusoïdale en forme de S pour se déplacer à travers les déserts du sud-ouest des États-Unis. Se heurter à des chevilles rigides dans un environnement de laboratoire ne l'amène pas à modifier activement cette forme d'onde, que Schiebel et ses collègues ont étudié à l'aide de caméras vidéo à haute vitesse avec huit animaux différents.
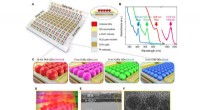
Dans une étude soutenue par la National Science Foundation, Bureau de recherche de l'armée, Agence des projets avancés de défense, et une bourse d'études supérieures en sciences et en génie de la Défense nationale, les chercheurs ont utilisé 253 voyages de serpents pour créer un schéma de diffraction. Remarquablement, le motif a également révélé que les directions de diffusion étaient "quantifiées" de telle sorte que la probabilité de trouver un serpent derrière le réseau puisse être représentée dans un motif imitant l'interférence des ondes. Un modèle informatique a pu capturer le motif, démontrant comment la direction des serpents serait modifiée par les rencontres d'obstacles via le flambement passif du corps.
"Un problème avec les robots se déplaçant dans le monde réel est que nous n'avons pas encore de principes permettant de comprendre comment contrôler au mieux ces robots sur des surfaces granuleuses comme le sable, feuilles mortes, des gravats ou de l'herbe, " a déclaré Daniel Goldman, un professeur de la famille Dunn à l'école de physique de Georgia Tech. "Le but de cette étude était d'essayer de comprendre comment les locomoteurs sans membres, qui ont de longs corps qui peuvent se plier de manière intéressante en utilisant des schémas de contrôle neuromécaniques potentiellement compliqués, réussir à se déplacer sur un terrain compliqué."
L'expérience du serpent a été suggérée par une étude robotique réalisée par la boursière postdoctorale Jennifer Rieser, qui ont trouvé un comportement similaire chez les robots rencontrant des obstacles.
"Le robot a tendance à avoir des aspects qui imitent les caractéristiques du monde subatomique - le monde quantique, " expliqua Goldman. " Quand il heurte des barrières, un robot se propage à travers ces barrières en utilisant des vagues de flexion du corps. Sa trajectoire dévie à la sortie des barrières, et de nombreux essais répétés révèlent un schéma de diffusion « grumeleux », analogue aux expériences. Nous avons réalisé que nous pouvions utiliser ce phénomène surprenant et magnifique, physique classique mais avec l'autopropulsion comme caractéristique clé, comme une expérience de diffusion pour interroger le schéma de contrôle utilisé par les serpents."
Expérimentalement, les chercheurs ont utilisé une « arène aux serpents » recouverte de tapis à poils longs pour imiter le sable. Les étudiants de premier cycle Alex Hubbard et Lillian Chen ont relâché les serpents un à la fois dans l'arène et les ont encouragés à se faufiler à travers la grille.
Les yeux des serpents du désert sont naturellement recouverts d'écailles pour les protéger. Les chercheurs ont utilisé de la peinture faciale pour enfants pour « bander » temporairement les yeux des animaux afin qu'ils ne soient pas distraits par les chercheurs. La peinture n'a pas fait de mal aux animaux.
"Quand nous posons les serpents dans l'arène, ils ont commencé à se déplacer en utilisant la même forme d'onde qu'ils utilisent sur le sable du désert, " expliqua Schiebel. " Ils rencontraient alors la grille à chevilles, passer par là, et continuez de l'autre côté en utilisant toujours cette forme d'onde."

Chercheurs (de gauche à droite) Perrin Schiebel, Lilian Chen, Jennifer Rieser et Dan Goldman sont représentés avec un serpent se déplaçant dans une arène expérimentale. Crédit :Allison Carter, Géorgie Tech
Au lieu de continuer à parcourir l'arène en ligne droite, les serpents sortiraient sous un angle différent, bien qu'ils n'aient pas saisi les poteaux ou les ont utilisés pour faciliter leur mouvement. Schiebel a travaillé avec Zeb Rocklin, un professeur assistant de physique de Georgia Tech, pour modéliser les changements de direction. Le modèle a montré comment des interactions simples entre le motif d'onde des serpents et le réseau produisent des motifs de directions de diffusion privilégiées.
"Nous pensons que le serpent fonctionne essentiellement dans un modèle que les ingénieurs de contrôle considéreraient" en boucle ouverte, ' », a déclaré Goldman. « Il établit un programme moteur particulier sur son corps, qui génère le motif d'onde caractéristique, et quand il heurte l'obstacle, sa mécanique corporelle lui permet de se déformer et de déplacer les poteaux sans dégrader sa vitesse."
Goldman pense que le travail pourrait aider les développeurs de robots ressemblant à des serpents à améliorer leurs schémas de contrôle.
"Nous pensons que nos découvertes du rôle de la dynamique passive chez le serpent peuvent faciliter de nouvelles conceptions de robots serpents qui leur permettront de se déplacer de manière plus fluide dans des environnements complexes, ", a-t-il déclaré. "L'objectif serait de construire des robots de recherche et de sauvetage capables d'entrer dans ces environnements complexes et d'aider les premiers intervenants."
Et en bonus, Goldman a dit, "Nous constatons que la richesse des interactions entre les systèmes automoteurs comme les serpents et les robots avec leur environnement est fascinante du point de vue de la physique de la 'matière active'."