La quête pour développer un micro-robot sans fil pour des applications biomédicales nécessite un "moteur" à petite échelle qui peut être alimenté sans fil par des milieux biologiques. Alors que les champs magnétiques peuvent être utilisés pour alimenter sans fil de petits robots, ils ne fournissent pas de sélectivité puisque tous les actionneurs (les composants contrôlant le mouvement) sous le même champ magnétique suivent simplement le même mouvement. Pour remédier à cette limitation intrinsèque de l'actionnement magnétique, une équipe de chercheurs allemands a développé un moyen d'utiliser des microbulles pour fournir la spécificité nécessaire pour alimenter des micro-robots pour des applications biomédicales.
Cette semaine à Lettres de physique appliquée , l'équipe décrit cette nouvelle approche qui offre de multiples avantages par rapport aux techniques précédentes.
"D'abord, en appliquant des ultrasons à différentes fréquences, plusieurs actionneurs peuvent être adressés individuellement ; seconde, les actionneurs ne nécessitent pas d'électronique embarquée ce qui les rend plus petits, plus léger et plus sûr; et troisième, l'approche est évolutive à la taille submillimétrique, " dit Tian Qiu, chercheur à l'Institut Max Planck pour les systèmes intelligents en Allemagne.
L'équipe de recherche a rencontré quelques surprises en cours de route. Normalement un matériau spécial, comme un matériau magnétique ou piézoélectrique, est nécessaire pour un actionneur. Dans ce cas, ils ont utilisé un polymère commercial standard qui emprisonne simplement les bulles d'air, puis utilisé l'interface air-liquide des bulles piégées pour convertir la puissance ultrasonore en mouvement mécanique.
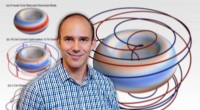
"Nous avons constaté qu'une surface mince (30-120 micromètres d'épaisseur effective) avec un motif topologique approprié peut fournir une force de propulsion à l'aide d'ultrasons, et des milliers de ces bulles ensemble peuvent pousser un appareil à l'échelle millimétrique, " a déclaré Qiu. " La simplicité de la structure et du matériel pour accomplir cette tâche a été une agréable surprise. "
L'équipe est déjà impatiente de développer davantage son actionneur.
"Les prochaines étapes consistent à augmenter la force de propulsion de la surface fonctionnelle, d'intégrer l'actionneur dans un dispositif biomédical utile, puis de le tester dans un environnement biologique réel, y compris in vivo, " dit Qiu.
L'adoption de surfaces microstructurées comme actionneurs sans fil ouvre de nouvelles possibilités prometteuses dans le développement de dispositifs et d'outils miniaturisés pour les environnements fluidiques accessibles par des champs ultrasonores de faible intensité. Ces surfaces fonctionnelles pourraient servir d'actionneurs sans fil prêts à fixer, alimenter des dispositifs biomédicaux miniaturisés pour des applications telles que les endoscopes actifs.