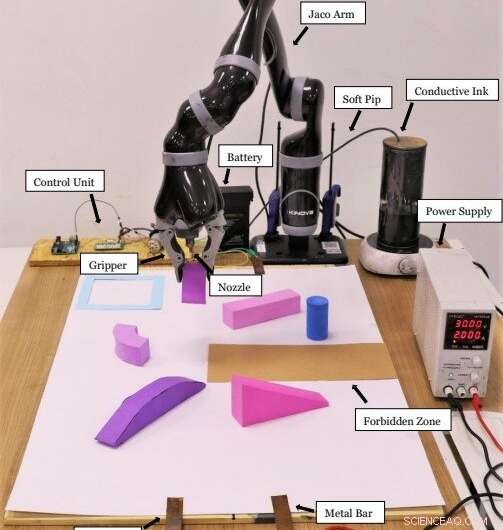
Montage expérimental du robot de dessin de circuit. Le Kinova 6DOF Jaco Arm effectue d'abord des actions de pick-and-place à la pose suggérée par le réseau. Ensuite, le bras se déplace vers l'une des barres métalliques à 5 cm au-dessus du carton. Le contrôleur ROS envoie en continu les waypoints du chemin du circuit calculés à partir de l'algorithme de planification de chemin 3D. Un Arduino reçoit alors l'état du bras via ROS et active/désactive la pompe péristaltique pour contrôler le débit d'encre. La connexion commence à montrer de la conductivité après le séchage de l'encre (30 minutes). Crédit :Xianglong Tan, Zhikang Liu, Chen Yu, Andre Rosendo, Réorganisation de l'environnement pour maximiser l'énergie avec un dessin de circuit robotique. arXiv:2111.08147v1 [cs.RO], https://arxiv.org/abs/2111.08147
Les avancées technologiques récentes ont ouvert la voie à la création de systèmes robotiques de plus en plus sophistiqués conçus pour accomplir de manière autonome des missions dans différents environnements familiers et inconnus. Les robots destinés à fonctionner dans des environnements incertains ou éloignés pourraient grandement bénéficier de la capacité d'acquérir activement de l'énergie électrique à partir de leur environnement.
Des chercheurs du Worcester Polytechnic Institute, de l'Imperial College de Londres et de l'Université de l'Illinois Urbana Champaign ont récemment développé un nouveau système robotique capable de réorganiser visuellement son environnement pour recevoir le maximum d'énergie d'une source d'alimentation donnée. Ce robot, présenté dans un article pré-publié sur arXiv et qui sera présenté à la conférence internationale IEEE sur la robotique et la biomimétique, fonctionne en dessinant des circuits électriques à l'aide d'encre conductrice.
"Notre PLOS ONE "Le travail a commencé comme une expérience de pensée assez philosophique", a déclaré Andre Rosendo, le professeur qui a mené l'étude, à TechXplore. but ultime. Sur la base de cette idée, nous avons commencé à concevoir des environnements expérimentaux où notre robot pourrait non seulement agir pour survivre, mais aussi pour prospérer."
Dans leur première étude portant sur ce sujet, Andre Rosendo, Xianglong Tan et Weijie Lyu ont tenté de concevoir un système qui pourrait s'alimenter simplement en peignant des circuits électriques. Dans leur nouveau travail, ils ont combiné ce système d'impression de circuits avec une pince robotique, créant un robot capable d'effectuer un répertoire d'actions visant à obtenir une plus grande puissance (c'est-à-dire des tensions plus élevées) de son environnement et ainsi survivre dans des environnements défavorables.
L'équipe a testé son robot dans des simulations de différents scénarios du monde réel, y compris des tâches dans lesquelles il devait éviter des obstacles physiques ou des régions qui interrompraient ses circuits dessinés. Ils ont ensuite également testé le robot dans un environnement réel, afin d'évaluer davantage ses capacités.
"Notre robot démarre chaque expérience avec une batterie, et sa source d'énergie diminue au fur et à mesure qu'il se déplace (et nous la "fuyons" également pour imiter les pertes d'énergie naturelles dues à l'homéostasie)", a expliqué l'étudiant Xianglong Tan. "Le robot passe par une série d'épisodes d'entraînement virtuels, avec un terminal rouge (VCC) qui doit être connecté à un autre terminal rouge près de son corps, et un terminal noir (sol) qui doit correspondre au noir pour que le courant peut s'écouler vers sa batterie."
Pour empêcher leur robot de se déplacer simplement en ligne droite simple, Rosendo et ses collègues ont ajouté des obstacles dans son environnement, à la fois dans des essais simulés et réels. Certains de ces obstacles, tels que des cubes de mousse, pouvaient facilement être enlevés par les robots, tandis que d'autres étaient connectés à une plaque de mise à la terre qui "aspirait" l'énergie électrique lorsqu'un circuit le touchait.
L'équipe a découvert que leur robot apprenait rapidement et efficacement à surmonter ces obstacles pour survivre et maximiser l'énergie reçue. Cela impliquait de réorganiser les obstacles ou de combler les zones de son environnement dans lesquelles il ne pouvait pas attirer.
"Je pense que nous prenons des mesures vers des comportements adaptatifs pour les robots", a déclaré Rosendo. "L'être humain est capable de s'adapter, d'ajuster son comportement pour qu'il corresponde à celui requis dans de nouvelles situations, et de s'améliorer progressivement au fur et à mesure que ses connaissances mûrissent. On pourrait parler de sports, de tâches ou même de missions spatiales :avant d'être au top de notre jeu, nous passons notre efforts initiaux pour comprendre les nouvelles règles pour, plus tard, s'améliorer et aller au-delà. De nos jours, les robots ont du mal à surmonter les dysfonctionnements et apprendre à s'adapter pour rester fonctionnels est une compétence qu'ils devraient imiter de nous."
Le robot adaptatif créé par Rosendo et ses collègues pourrait présenter de nombreux avantages, car il peut maximiser de manière autonome l'énergie dans son environnement et rester fonctionnel en permanence en créant de nouveaux circuits électriques. À l'avenir, ces travaux récents pourraient inspirer le développement d'autres systèmes robotiques capables de survivre et de prospérer dans des environnements complexes sans avoir besoin de nouveaux circuits ou d'une supervision humaine.
"Nous réfléchissons maintenant aux prochaines étapes pour tirer parti de notre travail et garder cette expérience intéressante, comme compliquer la tâche et concevoir un système" d'échange de batterie "pour rendre l'expérience plus réaliste", a ajouté Tan.
© 2022 Réseau Science X La puce neuromorphique réduit considérablement les besoins en énergie du robot roulant