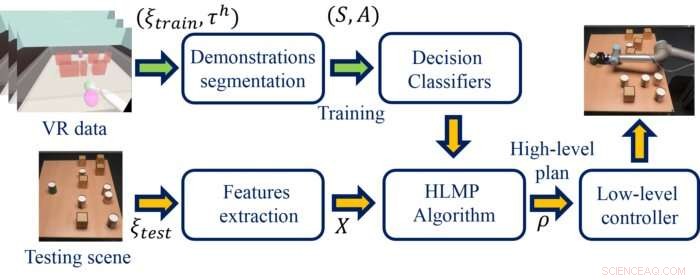
Figure décrivant le fonctionnement du planificateur de type humain. Crédit :Hasan et al.
Si la recherche dans le domaine de la robotique a permis des avancées significatives au cours des dernières années, il existe encore des différences substantielles dans la façon dont les humains et les robots manipulent les objets. En réalité, même les robots les plus sophistiqués développés jusqu'à présent ont du mal à égaler les compétences de manipulation d'objets du tout-petit moyen. Un aspect particulier de la manipulation d'objets que la plupart des robots ne maîtrisent pas encore est d'atteindre et de saisir des objets spécifiques dans un environnement encombré.
Pour surmonter cette limite, dans le cadre d'un projet financé par EPSRC, des chercheurs de l'Université de Leeds ont récemment développé un planificateur robotique de type humain qui combine des techniques de réalité virtuelle (VR) et d'apprentissage automatique (ML). Ce nouveau planificateur, présenté dans un article prépublié sur arXiv et qui sera présenté à la Conférence internationale sur la robotique et l'automatisation (ICRA), pourrait améliorer les performances d'une variété de robots dans des tâches de manipulation d'objets.
« Notre objectif de recherche est de développer de meilleurs systèmes robotiques ; des systèmes qui peuvent aider les humains dans une gamme de tâches, allant de l'exploration d'environnements dangereux à l'apprentissage de l'écriture d'un enfant, " Pr Anthony G. Cohn, chercheur principal de l'étude, a déclaré TechXplore. "Nous avons donc formé un groupe multidisciplinaire de psychologues et d'informaticiens pour explorer si nous pouvions capturer le comportement des humains et inverser les règles que les humains utilisent pour atteindre des objets."
Contrairement à d'autres chercheurs qui ont formé des classificateurs d'apprentissage automatique sur des images d'environnements encombrés, Cohn et ses collègues voulaient générer des données d'entraînement à l'aide de nouvelles technologies immersives. Dans leur étude, ils ont donc utilisé des équipements de réalité virtuelle pour collecter des données sur les humains effectuant des tâches de manipulation.
Ensuite, ils ont utilisé des classificateurs ML pour analyser les données de réalité virtuelle qu'ils ont collectées et extraire des règles générales pouvant sous-tendre la prise de décision humaine. Le planificateur utilise ces règles pour planifier des stratégies efficaces pour les robots effectuant des tâches de manipulation d'objets.
"Nous voulions que les plans résultants exécutés par le robot soient également" lisibles par l'homme, " dans le sens où ils seraient ceux qu'un humain s'attendrait à ce qu'un autre humain exécute, ce qui n'est pas le cas pour de nombreux plans de robots actuels, " expliqua Cohn.
Les décisions des humains qui effectuent des tâches de manipulation semblent être principalement guidées par des représentations qualitatives (c. pas la distance et la direction exactes de tous les objets dans leur environnement environnant, mais plutôt des distances et des directions relatives). Dans leur étude, les chercheurs ont tenté de mieux comprendre ces processus décisionnels afin de les reproduire en partie dans des classificateurs ML.
"Nous avons exploré comment les humains atteignent dans des scénarios où les objets qu'ils saisissent ont des relations spatiales particulières et avons utilisé des méthodes développées par des chercheurs en IA de l'Université de Leeds pour décrire qualitativement où se trouvaient les objets, " Dr Mohamed Hassan, un chargé de recherche travaillant sur le projet, expliqué. "Cela signifiait que le planificateur pouvait classer les relations spatiales qualitatives entre les objets, puis sélectionner les actions que les humains utiliseraient dans ce scénario."
L'approche proposée par Cohn et ses collègues permet aux robots d'identifier des actions efficaces pour atteindre un objet dans un espace encombré beaucoup plus rapidement qu'ils ne le feraient s'ils devaient considérer toutes les actions possibles. Il le fait en produisant un plan de haut niveau, qui est représenté comme une séquence de points de cheminement et de mouvements clés. Ce plan est transmis à un planificateur de bas niveau standard, qui l'utilise pour planifier des trajectoires détaillées pour le bras du robot.
"Notre planificateur fonctionne d'une manière qui ressemble au processus de planification d'un voyage en choisissant les villes à traverser et en ne décidant que plus tard exactement quelles routes et voies emprunter, " a déclaré Cohn. "Nous avons constaté que cette approche rend notre planificateur humain beaucoup plus efficace que les planificateurs existants."
Les chercheurs ont évalué leur planificateur dans une série d'expériences, le tester dans des scénarios de réalité virtuelle où les humains ont effectué des tâches de manipulation dans des simulations de robots basées sur la physique et à l'aide d'une véritable pince robotique. Les trois évaluations ont donné des résultats très prometteurs, avec le planificateur de type humain surpassant un état de l'art, algorithme d'optimisation de trajectoire standard.
Le planificateur conçu par Cohn et ses collègues a pu générer des stratégies efficaces qui ont permis aux robots d'atteindre des objets dans des environnements encombrés plus rapidement et plus efficacement qu'ils ne le feraient en utilisant les techniques d'optimisation de trajectoire standard. En plus d'introduire un planificateur de type humain prometteur pour les tâches de manipulation de robots, l'étude montre que la technologie VR peut être utilisée pour étudier le comportement humain et mieux comprendre les processus de prise de décision.
"Notre plateforme VR, qui a été développé en interne à l'Université de Leeds, nous a permis d'enregistrer des centaines de portées en peu de temps, mais nous pourrions également modifier la disposition de l'environnement entre chaque essai et présenter facilement exactement le même environnement à différents participants humains, " a déclaré le professeur Mark Mon-Williams, co-investigateur et psychologue cognitif, expliqué. "Nos résultats soutiennent nos récentes suggestions selon lesquelles la réalité virtuelle deviendra l'un des outils les plus omniprésents dans la recherche psychologique. Pourtant, nous avons également constaté que les règles qui sous-tendent la sélection des actions humaines peuvent être capturées par les méthodes de ML."
À l'avenir, le planificateur développé par Cohn et ses collègues pourrait aider à améliorer les compétences de manipulation des robots existants et nouveaux, permettant aux machines de sélectionner des actions plus efficacement et potentiellement même d'expliquer le « raisonnement » de leurs décisions. Cette étude récente pourrait également encourager d'autres chercheurs à utiliser les données de réalité virtuelle pour enquêter sur les processus décisionnels humains, qui pourraient alors être mieux reproduits dans les machines.
L'objectif ultime de la recherche est de construire des robots intelligents qui comprendront et anticiperont les intentions humaines dans des scénarios de collaboration homme-robot. Idéalement, de tels robots seraient également capables de réagir de manière humaine, communiquer avec les utilisateurs humains de la même manière qu'un autre humain le ferait.
"Le travail actuel est une preuve de concept, nous prévoyons donc maintenant de prendre la méthode que nous avons développée et d'exploiter son immense potentiel, " a déclaré Mon-Williams. " Il est devenu clair que cette combinaison d'informatique et de psychologie est une approche très utile qui a le potentiel de faire la lumière sur la sélection de l'action humaine, ce qui est important pour plusieurs raisons, y compris comprendre comment traiter les conditions médicales telles que les accidents vasculaires cérébraux, ainsi que nous aider à concevoir des robots plus efficaces. Nous travaillons actuellement sur notre prochaine série d'expériences et de projets."
© 2020 Réseau Science X