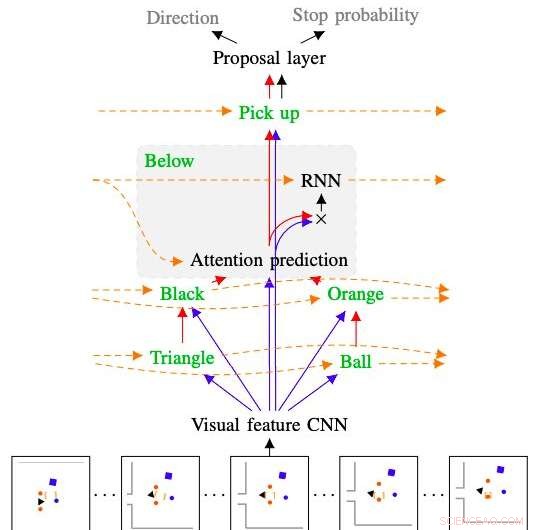
Figure montrant comment le modèle développé par les chercheurs interprète et suit la commande « ramasser la boule orange en dessous du triangle noir ». Crédit :Kuo, Katz &Barbu.
Dans les années à venir, les robots pourraient aider les utilisateurs humains de diverses manières, à la fois lorsqu'ils sont à l'intérieur de leur maison et dans d'autres contextes. Pour être plus intuitif, les robots doivent être capables de suivre des commandes et des instructions en langage naturel, car cela permet aux utilisateurs de communiquer avec eux comme ils le feraient avec d'autres humains.
Avec ça en tête, chercheurs du Center for Brains du MIT, Minds &Machines a récemment développé un planificateur robotique basé sur l'échantillonnage qui peut être formé pour comprendre des séquences de commandes en langage naturel. Le système qu'ils ont développé, présenté dans un article pré-publié sur arXiv, combine un réseau de neurones profonds avec un planificateur basé sur l'échantillonnage.
"Il est assez important de s'assurer que les futurs robots de nos maisons nous comprennent, à la fois pour des raisons de sécurité et parce que la langue est l'interface la plus pratique pour demander ce que vous voulez, " Andreï Barbu, l'un des chercheurs qui ont mené l'étude, a déclaré TechXplore. « Notre travail combine trois axes de recherche :la planification robotique, réseaux profonds, et notre propre travail sur la façon dont les machines peuvent comprendre le langage. L'objectif global est de donner à un robot seulement quelques exemples de ce que signifie une phrase et de lui faire suivre de nouvelles commandes et de nouvelles phrases qu'il n'a jamais entendues auparavant."
L'objectif de grande envergure de la recherche menée par Barbu et ses collègues est de mieux comprendre la communication par le langage corporel. En réalité, alors que les fonctions et les mécanismes de la communication orale sont maintenant bien compris, la plupart des communications qui ont lieu entre les animaux et les humains sont non verbales.
Une meilleure compréhension du langage corporel pourrait conduire au développement de stratégies plus efficaces pour la communication robot-humain. Entre autres, les chercheurs du MIT explorent ainsi la possibilité de traduire des phrases en mouvements robotiques, et vice versa. Leur étude récente est un premier pas dans cette direction.

Crédit :Kuo, Katz &Barbu.
« Les planificateurs robotiques sont formidables pour explorer ce que le robot peut faire, puis faire en sorte que le robot exécute une action, " Yen-Ling Kuo, un autre chercheur qui a mené l'étude, a déclaré TechXplore. "Notre travail prend une phrase, le brise en morceaux, ces morceaux sont traduits en petits réseaux, qui sont recombinés ensemble."
Tout comme le langage est composé de mots qui peuvent être combinés en phrases suivant des règles grammaticales, les réseaux développés par Barbu, Kuo et leur collègue Boris Katz sont constitués de réseaux plus petits formés pour comprendre des concepts uniques. Lorsqu'ils sont combinés ensemble, ces réseaux peuvent découvrir et représenter le sens de phrases entières.
Le nouveau planificateur robotique développé par les chercheurs comporte deux éléments clés. Le premier est un réseau de neurones profonds hiérarchique récurrent, qui contrôle la façon dont le planificateur explore le milieu environnant, tout en prédisant également quand un chemin planifié est susceptible d'atteindre un objectif donné et en estimant l'efficacité de chacun des mouvements possibles du robot individuellement. Le second est un planificateur basé sur l'échantillonnage souvent utilisé dans les études de robotique, appelé arbre aléatoire à exploration rapide (RRT).
"L'avantage majeur de notre planificateur est qu'il nécessite peu de données d'entraînement, " expliqua Barbu. " Si vous voulez apprendre à un robot, vous n'allez pas lui donner des milliers d'exemples chez vous, mais une poignée sont assez raisonnables. L'entraînement d'un robot devrait impliquer des actions similaires à celles que vous pourriez effectuer si vous entraîniez un chien."
Alors que des études antérieures ont également exploré les moyens de guider les robots via des commandes verbales, les techniques qui y sont présentées ne s'appliquent souvent qu'à des environnements discrets, dans lequel les robots ne peuvent effectuer qu'un nombre limité d'actions. Le planificateur développé par les chercheurs, d'autre part, peut prendre en charge une variété d'interactions avec l'environnement environnant, même s'il s'agit d'objets que le robot n'a jamais rencontrés auparavant.