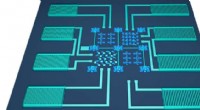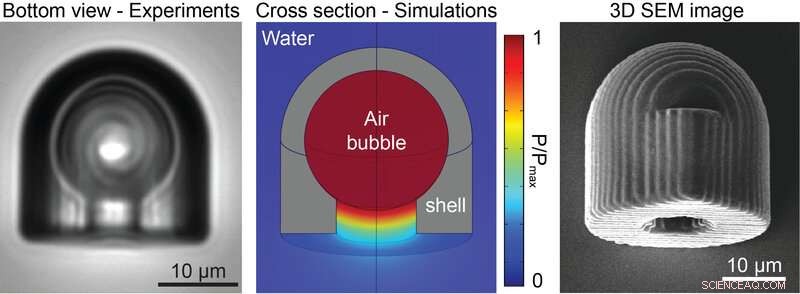
Figure 1. Image de microscopie du microrobot à alimentation acoustique avec une bulle d'air sphérique piégée à l'intérieur de son corps (à gauche) ; Champ de pression acoustique autour du microrobot prédit par les simulations numériques (milieu); Image de microscopie électronique à balayage du microrobot imprimé en trois dimensions avec une nageoire acérée en haut (à droite). Crédit :Institut Max Planck pour les systèmes intelligents de Stuttgart
Des chercheurs de l'Institut Max Planck pour les systèmes intelligents de Stuttgart ont conçu et fabriqué un microrobot non attaché qui peut glisser le long d'une surface plane ou incurvée dans un liquide lorsqu'il est exposé à des ondes ultrasonores. Sa force de propulsion est de deux à trois ordres de grandeur plus forte que la force de propulsion des micro-organismes naturels tels que les bactéries ou les algues. En outre, il peut transporter des marchandises en nageant. Le robot à propulsion acoustique a donc un potentiel important pour révolutionner le futur traitement mini-invasif des patients.
Stuttgart—Des chercheurs de l'Institut Max Planck pour les systèmes intelligents (MPI-IS) à Stuttgart ont mis au point un robot miniature synthétique d'un diamètre de 25 micromètres, qui est propulsé acoustiquement vers l'avant - une balle rapide, dans le vrai sens du terme. Moins que le diamètre d'un cheveu humain en taille, jamais auparavant un tel microrobot actionné n'avait atteint cette vitesse. Sa conception intelligente est si efficace qu'elle surpasse même les capacités de nage des micro-organismes naturels.
Les scientifiques ont conçu le microrobot polymère imprimé en 3D avec une cavité sphérique et une petite buse en forme de tube vers le bas (voir figure 1). Entouré de liquide tel que l'eau, la cavité emprisonne une bulle d'air sphérique. Une fois le robot exposé à des ondes acoustiques de l'ordre de 330 kHz, la bulle d'air pulse, pousser le liquide à l'intérieur du tube vers l'extrémité arrière du microrobot. Le mouvement du liquide propulse ensuite la balle vers l'avant assez vigoureusement jusqu'à 90 longueurs de corps par seconde. C'est une force de poussée de deux à trois ordres de grandeur plus forte que celle des micro-organismes naturels tels que les algues ou les bactéries. Les deux sont parmi les micronageurs les plus efficaces dans la nature, optimisé par évolution.
Le déploiement d'ondes ultrasonores pour actionner des microrobots n'est pas une nouvelle approche. Cependant, les robots précédents avec des capacités de nage se sont révélés relativement lents, difficile à contrôler près des surfaces, et ont eu un temps de fonctionnement relativement court de seulement quelques minutes. Tous ces facteurs sont des obstacles à leur utilisation dans des applications médicales pour l'administration ciblée de médicaments, désintoxication, ou des chirurgies non invasives. Les scientifiques du Département Intelligence Physique du MPI-IS, Dr Amirreza Aghakhani, Oncay Yasa, Paul Wrède, et le Dr Metin Sitti, qui est le directeur du département, ont pu affiner les capacités de pilotage de leur robot tout en augmentant la durée de fonctionnement à plusieurs heures. Leur publication « Microrobots mobiles à glissement de surface à propulsion acoustique » a été publiée dans le Actes de l'Académie nationale des sciences en février 2020.
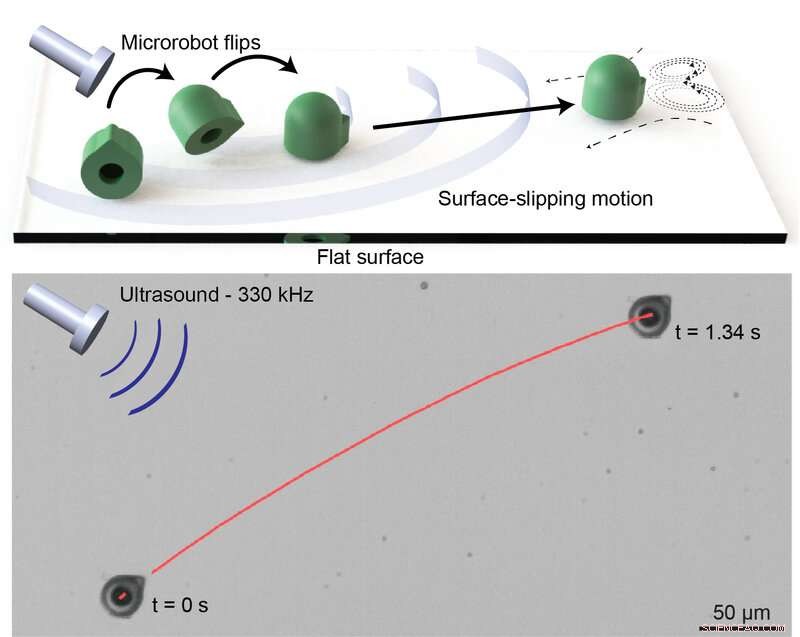
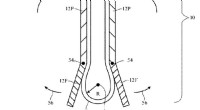
Figure 2. Schémas d'un microrobot glissant en surface sous alimentation par ultrasons (en haut) ; Image time-lapse du microbot en mouvement sur un substrat à une excitation acoustique de 330 kHz (en bas). Crédit :Institut Max Planck pour les systèmes intelligents de Stuttgart
En plus de concevoir le robot avec une cavité intérieure emprisonnant une bulle d'air sphérique avec une petite ouverture, ils ont ajouté une petite nageoire à la surface cylindrique du corps du microrobot (voir figure 2), qui biaise la direction de propulsion. Ils ont également recouvert le dessus de la balle en polymère d'une couche de nanofilm magnétique doux. Avec l'aide des champs magnétiques externes environnants, ils ont ensuite pu modifier la direction de la balle à gauche ou à droite, ainsi que vers le haut ou vers le bas.
Dans plusieurs expériences, les chercheurs ont testé la capacité de leur robot à se déplacer sur différentes surfaces à l'intérieur d'un microcanal semblable à un vaisseau sanguin. Ils ont exposé le robot à des ondes acoustiques et à un champ magnétique et ont réussi à le naviguer dans cet espace 3D confiné. Ils ont également montré que le piégeage de la cargaison se produit automatiquement pendant que le microrobot se déplace. Pendant que le liquide est poussé hors de la cavité du robot lorsqu'il est exposé aux ondes ultrasonores, un motif de microstreaming circulaire est généré vers le bas (voir figure 2). Ce courant garantit que les particules de médicament environnantes sont guidées vers le robot. Là, les particules s'amassent et sont transportées avec le mouvement du robot. Grâce à ça, le robot pourrait un jour être utilisé pour collecter des particules de médicament contre le cancer dans la circulation sanguine et transporter spécifiquement le médicament vers un carcinome, libérer la cargaison à courte distance pour un impact maximum.
Dr Amirreza Aghakhani, chercheur postdoctoral au Département Intelligence Physique et co-auteur principal de la publication, résume les particularités du microrobot :« Nous pouvons actionner nos microrobots de manière très efficace, et ils sont aussi très rapides. Les ultrasons sont inoffensifs pour le corps et peuvent pénétrer dans des régions profondes à l'intérieur du corps. Nous pouvons déplacer ces robots sur des surfaces planes et courbes de manière contrôlée et nous pouvons attacher différentes cargaisons, comme les médicaments. C'est impressionnant."
Un autre avantage est l'imagerie par ultrasons. A l'intérieur du corps, l'imagerie est très difficile lorsque le robot ne mesure que quelques micromètres. "Toutefois, la bulle d'air emprisonnée peut jouer le rôle d'agent de contraste, rendre le robot et son emplacement plus visibles, " ajoute le Dr Aghakhani.
"Notre vision est de déployer de tels microrobots à alimentation acoustique et à guidage magnétique à l'intérieur du corps humain pour diverses applications médicales non invasives dans un avenir proche, " conclut le Dr Metin Sitti.