Illustration du robot utilisé par les chercheurs. Crédit :Nordmoen et al.
L'un des principaux défis de la recherche en robotique est le développement de systèmes de contrôle efficaces et résilients, qui permettent aux robots de naviguer dans une variété d'environnements et de faire face à des événements inattendus. Des chercheurs de l'Université d'Oslo ont récemment développé une technique évoluée de coordination de phase incorporée pour la locomotion robuste d'un robot quadrupède. Leur travail, publié sur arXiv, a été en partie parrainé par le Conseil de la recherche de Norvège.
"Le facteur de motivation pour nous a été l'observation que certains comportements de robot que nous avons entraînés en simulation ne fonctionnaient pas correctement lorsqu'ils étaient testés sur le vrai robot, " Jørgen Nordmoen, l'un des chercheurs impliqués dans l'étude, a déclaré TechXplore. "Cette observation est un défi connu, souvent appelé "l'écart de la réalité, ' et nous voulions voir si l'utilisation des données des capteurs pouvait aider à surmonter ce défi."
Pour réduire efficacement le « fossé réel » qui est souvent observé dans les études de robotique, Nordmoen et ses collègues voulaient combiner des générateurs de motifs centraux (CPG) avec le retour du corps et des capteurs du robot. Les CPG sont une méthode populaire pour générer des ondulations rythmiques ou des modèles moteurs chez les robots, qui peut être utilisé comme support du mouvement. Les CPG artificiels sont inspirés de la moelle épinière des animaux, qui sont connus pour contenir des neurones qui génèrent des signaux rythmiques en l'absence d'informations sensorielles.
« Les CPG sont relativement simples à former, cependant, ils n'intègrent par eux-mêmes aucune information sur le monde extérieur, " Nordmoen a déclaré. "Nos principaux objectifs étaient de voir si nous pouvions combiner avec succès un réseau CPG complexe avec une coordination de phase incorporée et si l'incorporation de données de capteurs pouvait améliorer le comportement du robot dans le monde réel. "
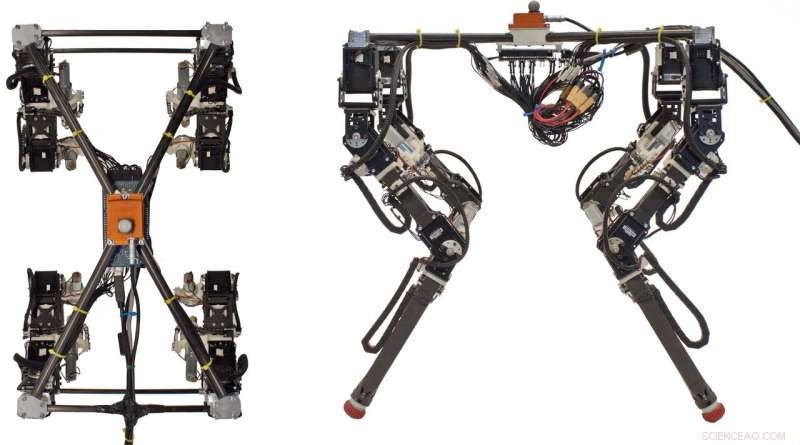
Images du robot utilisé par les chercheurs. Crédit :Nordmoen et al.
Les techniques de coordination de phase incorporée fonctionnent en détectant la quantité de pression exercée par le robot dans chacun de ses pieds, utilisant cette mesure pour contrôler la synchronisation de ses jambes. Dans leur étude, les chercheurs ont utilisé une approche minimaliste appelée TEGOTAE, qui utilise la rétroaction du capteur pour un couplage de phase émergent entre les jambes du robot.
D'habitude, dans les robots à pattes, chaque jambe est explicitement coordonnée avec les autres, ce qui signifie qu'une jambe connaît toujours la position relative des autres jambes. En revanche, dans l'approche de coordination de phase incorporée conçue par Nordmoen et ses collègues, chaque jambe est découplée des autres et le corps lui-même impose implicitement la synchronisation entre les jambes. Le capteur de pression du pied ajouté par les chercheurs permet une synchronisation implicite, améliorant finalement la coordination du robot.
"Notre méthode utilise un CPG plus complexe que d'autres approches, en utilisant la coordination de phase incorporée et en réalisant les expériences sur un robot plus complexe, " Nordmoen a déclaré. " En outre, nous avons entraîné le CPG à l'aide d'un algorithme d'optimisation évolutif, qui, avec la coordination des phases incarnées, permet au rythme de marche de s'adapter automatiquement au robot et à l'environnement."
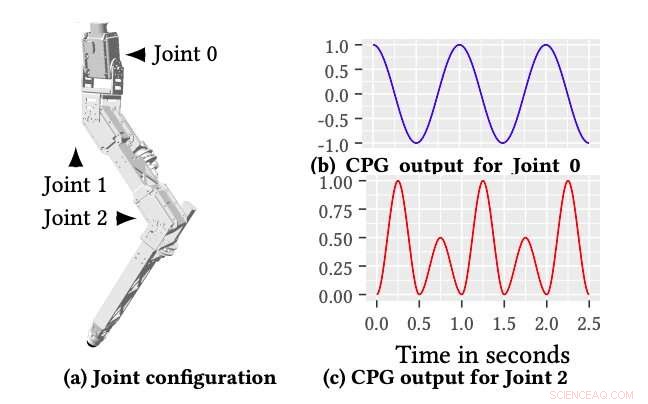
(a) montre une représentation visuelle d'une jambe du robot avec des articulations marquées. (b) montre un exemple de courbe de contrôle pour Joint 0 et Joint 1 tandis que (c) montre un exemple de courbe de contrôle pour Joint 2. Crédit :Nordmoen et al.
Dans leur étude, les chercheurs ont appliqué leur méthode au DyRET, un robot à quatre pattes avec une morphologie de mammifère. Ils ont d'abord entraîné le robot quadrupède à des simulations, et ont ensuite transféré leurs tests dans le monde réel pour vérifier si la formation était efficace. Cela leur a permis d'évaluer leur technique avant de l'appliquer dans des scénarios du monde réel sans endommager le robot.
"Pratiquement parlant, notre travail pourrait conduire à des robots à pattes qui s'adaptent mieux à leur environnement, gérant ainsi des environnements différents, " Nordmoen a déclaré. "Cela comprend la facilitation du transfert des contrôleurs de robot de la simulation au monde réel. Comme nous l'avons écrit dans le journal, les robots à pattes ont la possibilité d'aider l'utilisateur avec peu d'ajustements nécessaires de la part de l'utilisateur par rapport aux robots à roues. »
La technique mise au point par Nordmoen et ses collègues pourrait faciliter le développement de robots dotés de capacités de locomotion plus robustes. À l'avenir, d'autres chercheurs pourraient intégrer l'approche dans leurs robots ou s'inspirer de cette étude pour développer des techniques similaires. Selon Nordmoen, les difficultés associées à l'intégration de la rétroaction des capteurs dans les robots à pattes et la simplicité de cette nouvelle approche de coordination de phase incorporée pourraient être un excellent point de départ pour de futures recherches.
"Nous travaillons actuellement à mieux comprendre le mécanisme qui sous-tend la coordination des phases incarnées, " a-t-il ajouté. " Cela nous permettra, espérons-le, d'améliorer le concept et de générer de meilleures stratégies de mouvement. En outre, nous aimerions voir comment la coordination de la phase incarnée est affectée si le robot lui-même change. Avec notre robot unique, DyRET, nous avons la capacité de modifier la morphologie du robot et pouvons tester comment de tels changements influenceraient notre approche."
© 2019 Réseau Science X