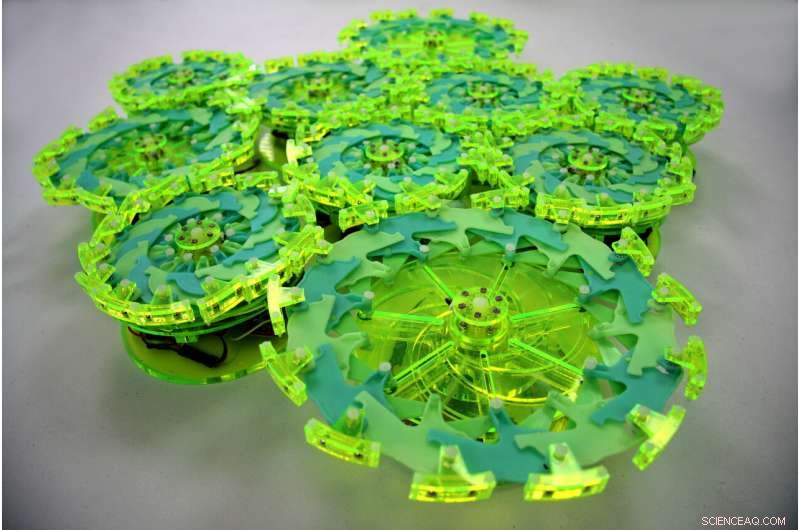
Des chercheurs du MIT et d'ailleurs ont développé des robots informatiques simples qui se connectent en grands groupes pour se déplacer, transporter des objets, et accomplir d'autres tâches. Crédit :Felice Frankel
En s'inspirant des cellules biologiques, chercheurs du MIT, Université de Columbia, et ailleurs ont développé des robots informatiques simples qui se connectent en grands groupes pour se déplacer, transporter des objets, et accomplir d'autres tâches.
Ce système dit de « robotique particulaire », basé sur un projet du MIT, Columbia Ingénierie, L'Université de Cornell, et des chercheurs de l'Université de Harvard — comprend de nombreuses unités individuelles en forme de disque bien nommées « particules ». Les particules sont reliées de manière lâche par des aimants autour de leurs périmètres. Chaque particule ne peut faire que deux choses :se dilater et se contracter. Mais ce mouvement, quand soigneusement chronométré, permet aux particules individuelles de se pousser et de se tirer les unes les autres dans un mouvement coordonné. Des capteurs embarqués permettent au cluster de graviter vers des sources lumineuses.
Dans un La nature papier, les chercheurs démontrent un cluster de deux douzaines de particules robotiques réelles et une simulation virtuelle pouvant aller jusqu'à 100, 000 particules se déplaçant à travers des obstacles vers une ampoule. Ils montrent également qu'un robot à particules peut transporter des objets placés en son sein.
Les robots à particules peuvent se former dans de nombreuses configurations et naviguer avec fluidité autour des obstacles et se faufiler dans des espaces étroits. Notamment, aucune des particules ne communique directement les unes avec les autres ou ne dépend les unes des autres pour fonctionner, ainsi des particules peuvent être ajoutées ou soustraites sans aucun impact sur le groupe. Dans leur papier, les chercheurs montrent que les systèmes robotiques à particules peuvent accomplir des tâches même lorsque de nombreuses unités fonctionnent mal.
Le papier représente une nouvelle façon de penser aux robots, qui sont traditionnellement conçus dans un seul but, comprennent de nombreuses pièces complexes, et arrêtez de travailler lorsqu'une pièce fonctionne mal. Des robots constitués de ces composants simplistes, disent les chercheurs, pourrait permettre plus évolutif, souple, et des systèmes robustes.
"Nous avons de petites cellules robotisées qui ne sont pas aussi capables en tant qu'individus mais peuvent accomplir beaucoup en tant que groupe, " dit Daniela Rus, directeur du Laboratoire d'informatique et d'intelligence artificielle (CSAIL) et professeur Andrew et Erna Viterbi de génie électrique et d'informatique. "Le robot en lui-même est statique, mais quand il se connecte avec d'autres particules de robot, tout d'un coup, le collectif de robots peut explorer le monde et contrôler des actions plus complexes. Avec ces 'cellules universelles, ' les particules du robot peuvent atteindre différentes formes, transformation globale, mouvement global, comportement global, et, comme nous l'avons montré dans nos expériences, suivre des gradients de lumière. C'est très puissant."
Rejoindre Rus sur le papier sont:le premier auteur Shuguang Li, un post-doctorant CSAIL; co-premier auteur Richa Batra et auteur correspondant Hod Lipson, tous deux de Columbia Engineering; David Brown, Hyun Dong Chang, et Nikhil Ranganathan de Cornell; et Chuck Hoberman de Harvard.
Au MIT, Rus a travaillé sur modulaire, robots connectés depuis près de 20 ans, y compris un robot cube en expansion et en contraction qui pourrait se connecter à d'autres pour se déplacer. Mais la forme carrée limitait le mouvement et les configurations des groupes de robots.
En collaboration avec le laboratoire de Lipson, où Li était étudiant diplômé jusqu'à son arrivée au MIT en 2014, les chercheurs ont opté pour des mécanismes en forme de disque qui peuvent tourner les uns autour des autres. Ils peuvent également se connecter et se déconnecter les uns des autres, et former dans de nombreuses configurations.
Chaque unité d'un robot à particules a une base cylindrique, qui abrite une batterie, un petit moteur, capteurs qui détectent l'intensité lumineuse, un microcontrôleur, et un composant de communication qui envoie et reçoit des signaux. Monté sur le dessus se trouve un jouet pour enfants appelé Hoberman Flight Ring - son inventeur est l'un des co-auteurs de l'article - qui se compose de petits panneaux connectés en une formation circulaire qui peuvent être tirés pour se dilater et repoussés pour se contracter. Deux petits aimants sont installés dans chaque panneau.
L'astuce consistait à programmer les particules robotiques pour qu'elles se dilatent et se contractent dans une séquence exacte pour pousser et tirer tout le groupe vers une source lumineuse de destination. Faire cela, les chercheurs ont équipé chaque particule d'un algorithme qui analyse les informations diffusées sur l'intensité lumineuse de chaque autre particule, sans avoir besoin d'une communication particule à particule directe.
Les capteurs d'une particule détectent l'intensité de la lumière d'une source lumineuse; plus la particule est proche de la source lumineuse, plus l'intensité est grande. Chaque particule diffuse en permanence un signal qui partage son niveau d'intensité perçu avec toutes les autres particules. Supposons qu'un système robotique à particules mesure l'intensité lumineuse sur une échelle de niveaux 1 à 10 :les particules les plus proches de la lumière enregistrent un niveau 10 et les plus éloignées enregistreront le niveau 1. Le niveau d'intensité, à son tour, correspond à un temps précis pendant lequel la particule doit se dilater. Les particules connaissant l'intensité la plus élevée (niveau 10) se dilatent en premier. Au fur et à mesure que ces particules se contractent, les prochaines particules dans l'ordre, niveau 9, puis développez. Ce mouvement d'expansion et de contraction chronométré se produit à chaque niveau suivant.
Les robots à particules sont composés de composants faiblement couplés, ou particules, qui n'ont pas d'identité individuelle ou de position adressable. Ils ne sont capables que d'un simple mouvement - expansion et contraction. Cependant, lorsqu'un groupe de particules est coordonné pour se déplacer en tant que collectif, un comportement intéressant est observé. Même dans des configurations amorphes, les robots à particules exploitent des phénomènes de mécanique statistique pour produire la locomotion. Crédit :Shuguang Li/Columbia Engineering
"Cela crée une onde mécanique d'expansion-contraction, un mouvement coordonné de poussée et de traînée, qui déplace un gros cluster vers ou loin des stimuli environnementaux, " dit Li. L'élément clé, Li ajoute, est la synchronisation précise d'une horloge synchronisée partagée entre les particules qui permet un mouvement aussi efficace que possible :"Si vous gâchez l'horloge synchronisée, le système fonctionnera moins efficacement."
Dans les vidéos, les chercheurs démontrent un système robotique à particules comprenant de vraies particules se déplaçant et changeant de direction vers différentes ampoules lorsqu'elles sont allumées, et se frayer un chemin à travers un espace entre les obstacles. Dans leur papier, les chercheurs montrent également que des clusters simulés jusqu'à 10, 000 particules maintiennent la locomotion, à la moitié de leur vitesse, même avec jusqu'à 20 pour cent des unités défaillantes.
"C'est un peu comme le proverbial 'gray goo', '" dit Lipson, professeur de génie mécanique à Columbia Engineering, faisant référence au concept de science-fiction d'un robot auto-répliquant qui comprend des milliards de nanobots. "La nouveauté clé ici est que vous avez un nouveau type de robot qui n'a pas de contrôle centralisé, pas de point de défaillance unique, pas de forme fixe, et ses composants n'ont pas d'identité unique."
L'étape suivante, Lipson ajoute, miniaturise les composants pour en faire un robot composé de millions de particules microscopiques.