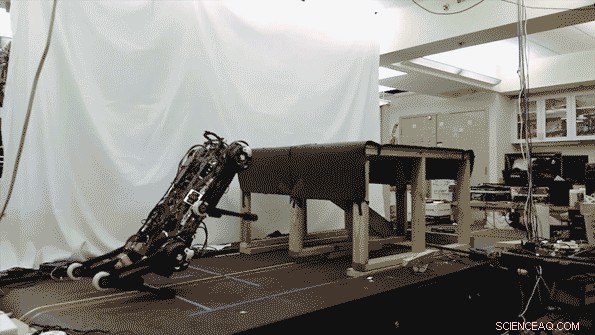
Crédit :Massachusetts Institute of Technology
Le robot Cheetah 3 du MIT peut désormais sauter et galoper sur un terrain accidenté, monter un escalier jonché de débris, et récupérer rapidement son équilibre lorsqu'il est soudainement tiré ou poussé, tout en étant essentiellement aveugle.
La bête mécanique de 90 livres, à peu près de la taille d'un Labrador adulte, est intentionnellement conçue pour faire tout cela sans avoir recours à des caméras ou à des capteurs environnementaux externes. Au lieu, il "sent" agilement son chemin à travers son environnement d'une manière que les ingénieurs décrivent comme "la locomotion aveugle, " un peu comme se frayer un chemin à travers une pièce plongée dans le noir.
« Il existe de nombreux comportements inattendus que le robot devrait être capable de gérer sans trop se fier à la vision, " dit le concepteur du robot, Sangbae Kim, professeur agrégé de génie mécanique au MIT. "La vision peut être bruyante, légèrement inexact, et parfois non disponible, et si vous comptez trop sur la vision, votre robot doit être très précis dans sa position et finira par être lent. Nous souhaitons donc que le robot s'appuie davantage sur les informations tactiles. De cette façon, il peut gérer des obstacles inattendus tout en se déplaçant rapidement."
Les chercheurs présenteront les capacités sans vision du robot en octobre lors de la Conférence internationale sur les robots intelligents, à Madrid. En plus de la locomotion à l'aveugle, l'équipe fera la démonstration du matériel amélioré du robot, y compris une amplitude de mouvement étendue par rapport à son prédécesseur Cheetah 2, qui permet au robot de s'étirer d'avant en arrière, et tourne d'un côté à l'autre, un peu comme un chat qui s'assoupit pour bondir.
Au cours des prochaines années, Kim imagine que le robot effectue des tâches qui seraient autrement trop dangereuses ou inaccessibles pour les humains.
"Cheetah 3 est conçu pour effectuer des tâches polyvalentes telles que l'inspection des centrales électriques, qui implique diverses conditions de terrain, y compris des escaliers, bordures, et obstacles au sol, " dit Kim. "Je pense qu'il y a d'innombrables occasions où nous [voudrions] envoyer des robots pour effectuer des tâches simples au lieu d'êtres humains. Dangereux, sale, et les travaux difficiles peuvent être effectués de manière beaucoup plus sûre grâce à des robots télécommandés. »
S'engager
Le Cheetah 3 peut se frayer un chemin à l'aveuglette dans les escaliers et à travers des terrains non structurés, et peut retrouver rapidement son équilibre face à des forces inattendues, grâce à deux nouveaux algorithmes développés par l'équipe de Kim :un algorithme de détection de contact, et un algorithme de contrôle prédictif de modèle.
L'algorithme de détection de contact aide le robot à déterminer le meilleur moment pour qu'une jambe donnée passe de se balancer dans les airs à marcher sur le sol. Par exemple, si le robot marche sur une brindille légère contre une dure, rocher lourd, comment il réagit et s'il continue d'aller de l'avant, ou tire en arrière et balance sa jambe à la place - peut faire ou casser son équilibre.
"Quand il s'agit de passer de l'air au sol, la commutation doit être très bien faite, " dit Kim. "Cet algorithme est vraiment à propos de, « Quand est-ce un moment sûr pour faire mes pas ? » »
L'algorithme de détection de contact aide le robot à déterminer le meilleur moment pour faire la transition d'une jambe entre le swing et le pas, en calculant en permanence pour chaque jambe trois probabilités :la probabilité qu'une jambe entre en contact avec le sol, la probabilité de la force générée une fois que la jambe touche le sol, et la probabilité que la jambe soit au milieu de l'élan. L'algorithme calcule ces probabilités à partir des données des gyroscopes, accéléromètres, et les positions articulaires des jambes, qui enregistrent l'angle et la hauteur de la jambe par rapport au sol.
Si, par exemple, le robot marche inopinément sur un bloc de bois, son corps va soudainement s'incliner, décaler l'angle et la hauteur du robot. Ces données alimenteront immédiatement le calcul des trois probabilités pour chaque jambe, que l'algorithme combinera pour estimer si chaque jambe doit s'engager à appuyer sur le sol, ou soulever et se balancer pour garder son équilibre, le tout pendant que le robot est pratiquement aveugle.

Le robot Cheetah 3 du MIT peut monter des escaliers et franchir des obstacles sans l'aide de caméras ou de capteurs visuels. Crédit :Massachusetts Institute of Technology
"Si les humains ferment les yeux et font un pas, nous avons un modèle mental pour l'endroit où le sol pourrait être, et peut s'y préparer. Mais on mise aussi sur le toucher du sol, " dit Kim. "Nous faisons en quelque sorte la même chose en combinant plusieurs [sources d'] informations pour déterminer le temps de transition."
Les chercheurs ont testé l'algorithme dans des expériences avec le Cheetah 3 trottant sur un tapis roulant de laboratoire et grimpant sur un escalier. Les deux surfaces étaient jonchées d'objets aléatoires tels que des blocs de bois et des rouleaux de ruban adhésif.
"Il ne connaît pas la hauteur de chaque marche, et ne sait pas qu'il y a des obstacles dans les escaliers, mais il s'enfonce sans perdre l'équilibre, " dit Kim. " Sans cet algorithme, le robot était très instable et tombait facilement."
Force future
La locomotion à l'aveugle du robot était également due en partie à l'algorithme de contrôle prédictif du modèle, qui prédit la force qu'une jambe donnée doit appliquer une fois qu'elle s'est engagée dans une étape.
"L'algorithme de détection de contact vous dira, 'c'est le moment d'appliquer des forces sur le terrain, '" dit Kim. "Mais une fois que vous êtes au sol, maintenant, vous devez calculer le type de forces à appliquer pour pouvoir déplacer le corps de la bonne manière."
L'algorithme de contrôle prédictif du modèle calcule les positions multiplicatives du corps et des jambes du robot une demi-seconde dans le futur, si une certaine force est appliquée par une jambe donnée lorsqu'elle entre en contact avec le sol.
"Dites que quelqu'un donne un coup de pied au robot sur le côté, " dit Kim. " Quand le pied est déjà au sol, l'algorithme décide, « Comment dois-je spécifier les forces sur le pied ? Parce que j'ai une vitesse indésirable sur la gauche, donc je veux appliquer une force dans la direction opposée pour tuer cette vitesse. Si j'applique 100 newtons dans cette direction opposée, que va-t-il se passer une demi-seconde plus tard ?"
L'algorithme est conçu pour effectuer ces calculs pour chaque jambe toutes les 50 millisecondes, ou 20 fois par seconde. Dans les expériences, les chercheurs ont introduit des forces inattendues en donnant des coups de pied et en poussant le robot alors qu'il trottait sur un tapis roulant, et le tirant par la laisse alors qu'il montait un escalier chargé d'obstacles. Ils ont découvert que l'algorithme prédictif de modèle permettait au robot de produire rapidement des contre-forces pour retrouver son équilibre et continuer à avancer, sans trop basculer dans la direction opposée.
"C'est grâce à ce contrôle prédictif qui peut appliquer les bonnes forces au sol, combiné à cet algorithme de transition de contact qui rend chaque contact très rapide et sécurisé, " dit Kim.
L'équipe avait déjà ajouté des caméras au robot pour lui donner un retour visuel de son environnement. Cela aidera à cartographier l'environnement général, et donnera au robot un avertissement visuel sur les obstacles plus grands tels que les portes et les murs. Mais pour l'instant, l'équipe travaille à améliorer encore la locomotion aveugle du robot
"Nous voulons d'abord une très bonne manette sans vision, " dit Kim. " Et quand nous ajoutons la vision, même si cela peut vous donner des informations erronées, la jambe doit être capable de gérer (obstacles). Car que se passe-t-il s'il marche sur quelque chose qu'une caméra ne peut pas voir ? Qu'est-ce que ça va faire? C'est là que la locomotion aveugle peut aider. Nous ne voulons pas trop nous fier à notre vision."
Cette histoire est republiée avec l'aimable autorisation de MIT News (web.mit.edu/newsoffice/), un site populaire qui couvre l'actualité de la recherche du MIT, innovation et enseignement.