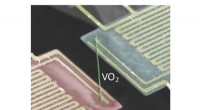
Le robot doux est contrôlé par deux vannes, un pour appliquer une pression pour plier le bras et un pour un vide qui engage les ventouses. En changeant la pression et le vide, le bras peut s'attacher à n'importe quel objet, l'entourer, porte-le, et relâchez-le. Crédit :le Bertoldi Lab/Harvard SEAS
De toutes les choses sympas à propos des pieuvres (et il y en a beaucoup), leurs bras peuvent être parmi les plus cool.
Les deux tiers des neurones d'une pieuvre sont dans ses bras, ce qui signifie que chaque bras a littéralement son propre esprit. Les bras de poulpe peuvent dénouer les nœuds, bouteilles ouvertes à l'épreuve des enfants, et envelopper des proies de toute forme ou taille. Les centaines de ventouses qui recouvrent leurs bras peuvent former de solides phoques même sur des surfaces rugueuses sous l'eau.
Imaginez si un robot pouvait faire tout cela.
Des chercheurs de la Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) et de l'Université Beihang ont développé un bras robotique souple inspiré de la pieuvre qui peut saisir, mouvement, et manipuler un large éventail d'objets. Sa souplesse, conception conique, complet avec ventouses, donne à la pince une prise ferme sur des objets de toutes formes, tailles et textures, des œufs aux iPhones en passant par les gros ballons d'exercice.
"La plupart des recherches antérieures sur les robots inspirés du poulpe se concentraient soit sur l'imitation de l'aspiration, soit sur le mouvement du bras, mais pas les deux, " dit August Domel, un doctorat récent. diplômé de Harvard et co-premier auteur de l'article. "Notre recherche est la première à quantifier les angles d'effilage des bras et les fonctions combinées de flexion et d'aspiration, qui permet d'utiliser une seule petite pince pour une large gamme d'objets qui nécessiteraient autrement l'utilisation de plusieurs pinces."
Le robot doux est contrôlé par deux vannes, un pour appliquer une pression pour plier le bras et un pour un vide qui engage les ventouses. En changeant la pression et le vide, le bras peut s'attacher à n'importe quel objet, l'entourer, porte-le, et relâchez-le. Crédit :le Bertoldi Lab/Harvard SEAS
La recherche est publiée dans Robotique douce .
Les chercheurs ont commencé par étudier l'angle d'effilage de vrais bras de poulpe et à quantifier quelle conception pour plier et saisir des objets fonctionnerait le mieux pour un robot souple. Prochain, l'équipe a examiné la disposition et la structure des ventouses (oui, c'est le terme scientifique) et les a incorporés dans la conception.
"Nous avons imité la structure générale et la distribution de ces ventouses pour nos actionneurs souples, " a déclaré le co-premier auteur Zhexin Xie, un doctorat étudiant à l'université de Beihang. "Bien que notre conception soit beaucoup plus simple que son homologue biologique, ces ventouses biomimétiques sous vide peuvent se fixer à presque n'importe quel objet."
Xie est le co-inventeur du Festo Tentacle Gripper, qui est la première mise en œuvre entièrement intégrée de cette technologie dans un prototype commercial.