Il est difficile d'imaginer une entreprise plus dramatique que le voyage dans l'espace, dans lequel des âmes courageuses s'enferment dans des véhicules étonnants et sont lancées par des explosions contrôlées dans un environnement hostile à toute vie connue - le tout au nom de la science et de l'audace humaine.
Faire atterrir un vaisseau spatial sur la Lune n'aurait pas été la même sans les astronautes. A travers leurs commentaires, les gens sur Terre qui regardaient les images granuleuses en noir et blanc du paysage lunaire partageaient un lien avec l'éternel et l'extraterrestre. Leur voyage nous a doté d'une expérience commune plus grande que tout ce qu'Hollywood pourrait créer, parce que c'était réel.
Les voyages dans l'espace font des ravages sur les astronautes car le corps humain n'est pas adapté aux conditions difficiles qui régissent les royaumes au-delà de notre atmosphère. A l'intérieur d'une capsule ou d'une navette, Les voyageurs spatiaux doivent faire de l'exercice régulièrement pour éviter la perte de densité osseuse et l'atrophie musculaire causées par des périodes prolongées passées en microgravité. Les compartiments de l'équipage doivent être pressurisés avec le bon mélange de gaz respirables et de vapeur d'eau, et les systèmes doivent faire circuler et revitaliser ces gaz pour garder l'air respirable. La température doit également être soigneusement régulée, sans parler des systèmes d'approvisionnement en nourriture et en eau et d'évacuation des déchets.
Articles Liés
À l'extérieur, les astronautes rencontrent des températures qui peuvent osciller de 248 degrés F (120 degrés C) à moins 148 degrés F (moins 100 degrés C), et c'est juste près de la Terre. La température de l'espace lointain chute à moins 454 degrés F (moins 270 degrés C). Sans l'atmosphère terrestre pour les protéger du rayonnement solaire, les astronautes survivent en portant des combinaisons spatiales encombrantes qui coûtent des millions de dollars pièce et ne sont pas pratiques en cas d'urgence. Si la Station spatiale internationale (ISS) était heurtée par un objet et devait être réparée immédiatement, il faudrait des heures à un astronaute pour se préparer à une sortie dans l'espace et effectuer des réparations [source :Coulter, "Robonaut 2 devrait être lancé en février"].
La NASA et d'autres programmes spatiaux reconnaissent la fragilité du corps humain et travaillent sur des moyens de tirer le meilleur parti du temps de leurs astronautes tout en réduisant leur exposition au danger. L'une des approches les plus passionnantes actuellement en cours a donné naissance à une nouvelle race d'astronautes, un mieux adapté pour survivre en dehors des engins spatiaux.
Dans cet article, nous apprendrons le développement de ces astronautes robotiques, ou robotnautes , et comment ils aideront les humains dans l'espace.
Des sondes et des rovers robotiques se sont rendus sur Mars depuis avant notre atterrissage sur la lune. En 1965, Mariner IV renvoyé les premières images rapprochées de la planète rouge. En 1997, les Éclaireur Le rover a fourni des détails sans précédent sur l'atmosphère et la surface martiennes. De plus, qui peut oublier les contributions remarquables de Esprit et Opportunité , les deux rovers martiens lancés à l'été 2003 qui ont tellement survécu à leur mission initiale ?
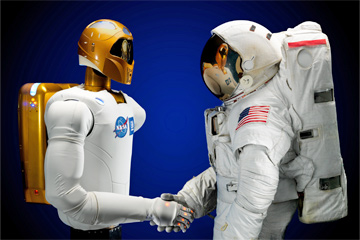
La NASA a basé ses astronautes robotiques sur une conception humanoïde. Le premier d'entre eux, Robotnaute 1 (alias R1 ), comportait une tête, deux yeux, deux bras et deux mains à cinq chiffres. Les concepteurs ont protégé la tête de R1 avec un casque en résine époxy et ont monté la tête sur un cou articulé, ce qui lui permettait de tourner d'un côté à l'autre et de regarder de haut en bas. Au sein du robotnaute pionnier, deux caméras vidéo livrées stéréovision à l'opérateur et a permis à R1 de suivre les objets. La stéréovision imite la vision humaine en comparant les images d'un "œil" droit et gauche (caméra) et en utilisant parallaxe -- la différence apparente dans la position d'un objet causée par l'angle de vision différent de chaque œil -- pour déterminer la profondeur et détecter le mouvement. Les bras de R1 étaient capables d'une plus grande amplitude de mouvement que les bras humains et contenaient plus de 150 capteurs chacun.
La NASA a commencé la construction de R1 en 1997, et il a servi de plate-forme expérimentale dans les tests en laboratoire et sur le terrain jusqu'en 2006. C'était une preuve de concept réussie, mais il n'a jamais quitté le laboratoire.
En 2006, La NASA a signé un accord avec General Motors pour produire Robotnaute 2 ( R2 ). GM développait également des robots adroits à l'époque et avait travaillé avec la NASA sur le rover lunaire. La NASA a dévoilé R2 en février 2010, et le robotnaute s'est rendu à son domicile permanent sur la Station spatiale internationale le 24 février, 2011, sur l'une des dernières missions de la navette spatiale.
Comme R1, R2 est conçu pour aider les humains et automatiser les tâches répétitives, tâches ennuyeuses ou fatigantes - telles que la mise en place des outils et de l'équipement nécessaires aux missions - permettant aux astronautes de se concentrer sur des tâches pour lesquelles eux seuls sont qualifiés.
Considérez R2 comme R1-plus - plus petit, moins cher, plus avancés et capables de survivre aux rigueurs du lancement et de l'espace. R2 livre plus de 350 capteurs, 40 dont il utilise pour détecter son environnement. Cela comprend quatre caméras à lumière visible dans ses yeux et une cinquième caméra infrarouge dans sa bouche pour faciliter la perception de la profondeur. Son estomac contient 38 processeurs informatiques. Bien que sa force soit comparable à celle de R1 - il peut soulever environ 20 livres (9 kilogrammes) - R2 est plus habile avec ses appendices pratiques :alors que les mains de R1 étaient semblables aux mains gantées d'un astronaute, Les R2 ressemblent plus à des mains humaines non gantées.
R2 peut manipuler une couverture, ramasser une enveloppe et saisir un haltère, mais sa dextérité est plus grande que la somme de ses parties. Les utilisateurs peuvent contrôler la rigidité articulaire de R2, ce qui donne à R2 une longueur d'avance sur les robots "à contrôle de position" typiques comme les robots d'assemblage automobile, qui manquent de "donner" dans leurs systèmes et doivent s'aligner parfaitement pour faire leur travail. Un tel robot serait nul pour mettre une cheville dans un trou; même un léger désalignement entraînerait l'écrasement de la cheville dans la zone autour du trou. R2, inversement, peut "sentir" son chemin vers la maison, déplacer la cheville doucement vers l'avant et faire de petits, corrections de glissement en cas de désalignement, comme un humain le ferait. La flexibilité de R2 le rend également plus sûr pour ses compagnons humains, qui peut arrêter son mouvement sans trop de force, évitant ainsi les blessures.
Voici les spécifications pour Robonaut 1 et 2 :
Caractéristiques Robotnaute 1
Robotnaute 2
Hauteur 6,23 pieds (1,9 mètres)3,33 pieds (1,0 mètre) (taille à la tête) Poids 410 livres (182 kilogrammes)330 livres (150 kilogrammes) Matériaux structurels
Principalement en aluminium avec rembourrage en Kevlar et Teflon pour le protéger du feu et des débrisPrincipalement en aluminium avec de l'acier, fibre de carbone nickelée et non métalliques Plateforme informatique
Processeur PowerPC38 processeurs PowerPC Système opérateur
VxWorksVxWorks
Quel que soit l'avenir des robotnautes, la compétition s'échauffe comme une navette à la rentrée.
Robonaute 2 (R2), comme son prédécesseur, est contrôlé par téléprésence, dans lequel une personne - un astronaute ou un opérateur au contrôle de mission - guide le robot à distance tout en voyant à travers ses yeux via des caméras embarquées. L'opérateur peut porter des gants pour actionner les mains de R2, ou contrôler les mouvements de la tête de R2 en portant un casque relié à distance à la tête du robot.
R2 n'est pas une simple marionnette, toutefois. Comme les rovers martiens, le robotnaute opère également en autonomie supervisée, ce qui signifie qu'il est livré avec des séquences de commandes (scripts) qui lui indiquent comment effectuer certaines tâches de manière autonome. Un opérateur surveille sa progression au cours de ces actions et peut apporter les corrections nécessaires en temps réel. L'espoir est que R2 passera un jour de robo-stagiaire à robo-employé et nécessitera très peu d'observation ou de direction.
Comme R1, Le cerveau de R2 consiste en une série de processeurs PowerPC - une technologie utilisée dans d'autres applications spatiales - exécutant le système d'exploitation en temps réel VxWorks. La NASA affirme que cette combinaison offre une informatique flexible et prend en charge des activités de développement variées. Le logiciel système est écrit en C et C++. Le logiciel ControlShell facilite le processus de développement et fournit un environnement de développement graphique, ce qui améliore la compréhension des chercheurs du système et du code.
Initialement, R2 sera confiné dans un laboratoire de la Station spatiale internationale. Là, il exécutera des tests en utilisant une série de cartes avec des commutateurs, boutons et connecteurs comme ceux que les astronautes utilisent. Les ingénieurs sur le terrain enverront les mises à jour matérielles et logicielles selon les besoins. Finalement, R2 sera équipé d'une ou plusieurs jambes avec des orteils qui s'adaptent aux cale-pieds intégrés aux murs de la station, qui permettra à R2 de grimper tout en laissant les mains libres pour transporter du matériel ou effectuer des tâches.
Finalement, R2 recevra des équipements d'activités extravéhiculaires (EVA) et pourra effectuer des sorties extravéhiculaires à l'extérieur de la station. Il pourra alors aménager des chantiers et réduire le temps que les humains doivent passer à l'extérieur. Parce qu'il peut passer beaucoup plus rapidement à l'extérieur que les astronautes, R2 sera également en mesure de répondre aux urgences. La NASA travaille sur une batterie (actuellement R2 doit être branché) pour augmenter la portée du R2, et les futurs robotnautes pourraient être équipés de roues ou même d'un jetpack pour des missions d'exploration et de maintenance. Les robots adroits comme R2 ne se limiteront pas non plus à l'exploration de l'espace :un jour, ils pourraient pénétrer dans des endroits dangereux sur Terre à la place des humains, comme les volcans et les centrales nucléaires.
Dirigez-vous vers la page suivante pour plus de lecture robotique que vous pourriez aimer.
Articles Liés
Plus de grands liens
Sources