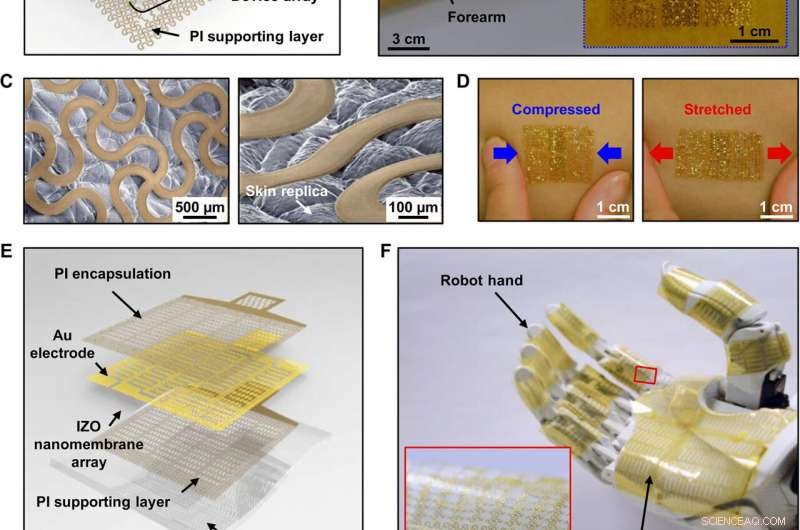
Très mince, extensible, mécaniquement imperceptible, appareil IHM multifonctionnel pour l'homme et la robotique. (A) Vue éclatée schématique d'un appareil IHM multifonctionnel ultrafin. (B) Image optique de l'appareil sur un avant-bras humain. L'encart est une image agrandie. (C) Image SEM de l'appareil sur un morceau de peau répliquée. (D) Images optiques de l'appareil sur une peau humaine sous déformation mécanique :compressée (à gauche) et étirée (à droite). (E) Vue éclatée schématique du réseau de capteurs de température pour la main robotique. (F) Image optique du réseau de capteurs de température sur une main robotique. L'encart est une image agrandie. (G) Images SEM du réseau de capteurs de température. (H) Images optiques du réseau de capteurs de température sur la main robotique sous déformation mécanique :courbé (à gauche) et étiré (à droite). Crédit photo :Kyoseung Sim, Université de Houston. Crédit :Avancées scientifiques, doi:10.1126/sciadv.aav9653
Les interfaces homme-machine électroniques portables (IHM) sont une classe émergente de dispositifs destinés à faciliter les interactions homme-machine. Les progrès de l'électronique, les matériaux et les conceptions mécaniques ont ouvert des voies vers des dispositifs IHM portables commerciaux. Cependant, les dispositifs existants sont inconfortables car ils restreignent les mouvements du corps humain avec des temps de réponse lents et des défis pour réaliser de multiples fonctions. Dans un récent rapport sur Avancées scientifiques, Kyoseung Sim et une équipe de recherche interdisciplinaire en science et ingénierie des matériaux, génie mécanique, génie biomédical, génie électrique et informatique aux États-Unis et en Chine, a détaillé le développement d'un nouveau polymère.
Dans le travail, ils ont conçu un dispositif électronique extensible ultra-mince à base de nanomembrane semi-conductrice à base de nanomembrane d'oxyde de zinc et d'indium traité sol-gel-sur-polymère. Les avantages comprenaient la multifonctionnalité, procédés de fabrication simples, usure imperceptible et entoilage robuste. Les dispositifs IHM portables multifonctionnels allaient de la mémoire résistive à accès aléatoire (ReRAM) pour le stockage des données à la formation de transistors à effet de champ (FET) interfacés avec des circuits de commutation. Les fonctionnalités supplémentaires comprenaient des capteurs pour la santé et la détection des mouvements corporels, et des micro-réchauffeurs pour fournir la température. Après avoir testé les composants individuels pour leurs propriétés uniques, Sim et al. a conçu les dispositifs IHM en tant que dispositifs portables sans couture pour les humains et également en tant que peau prothétique pour les robots afin d'offrir un retour intelligent et de former un système IHM (interface homme-machine) en boucle fermée.
Les interfaces homme-machine (IHM) portables fonctionnent comme des voies de communication directes entre les humains et les machines. Les interfaces peuvent détecter les paramètres physiques ou électrophysiologiques des porteurs et aider les machines à exécuter les fonctions correspondantes. Développements récents en électronique, les matériaux et les conceptions mécaniques ont des dispositifs IHM avancés. De tels wearables sont, cependant, encore semi-doux et inconfortable pour une intégration transparente en raison de l'incapacité à se déformer et à s'adapter à une gamme de mouvements humains dynamiques. Les matériaux électroniques souples qui correspondent parfaitement aux exigences d'intérêt offrent une alternative pour construire l'étirable, appareils IHM portables. Cependant, les matériaux caoutchouteux souples ont présenté des temps de réponse lents pour subir une hystérésis substantielle lors d'une déformation cyclique. Relativement, les matériaux inorganiques peuvent présenter des temps de réponse rapides et subir une hystérésis substantielle pour être adoptés en tant qu'électronique portable et capteurs.
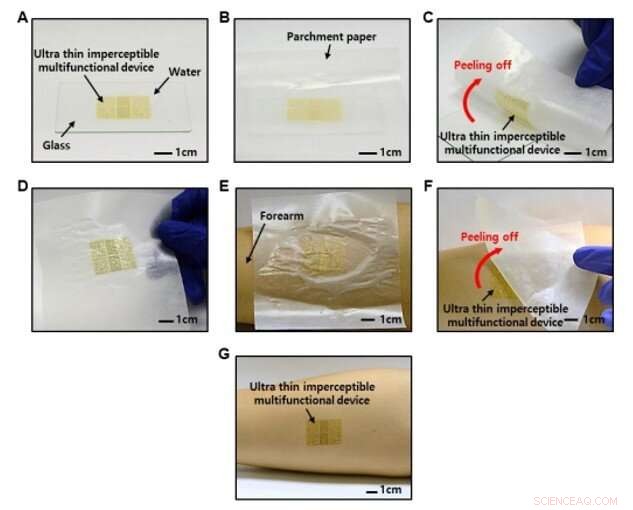
Transfert du dispositif IHM ultrafin imperceptible sur l'avant-bras humain. (A) Un dispositif fabriqué sur du verre avec de l'eau appliquée. (B) Lamination de papier parchemin sur le dessus de l'électronique. (C) Récupération du dispositif IHM en décollant du papier parchemin. (D) Une image du périphérique IHM sur du papier parchemin. (E) Papier parchemin de plastification avec le dispositif IHM sur l'avant-bras. (F) Décoller le papier parchemin. (G) Une image du périphérique IHM transféré sur l'avant-bras. (Crédit photo :Kyoseung Sim, Université de Houston). Crédit :Avancées scientifiques, doi:10.1126/sciadv.aav9653
Des propriétés matérielles uniques peuvent faciliter le froissement, formes de serpentine et de kirigami pour servir de catalyseurs clés pour les appareils IHM à caractère souple et extensible. Pour réaliser plusieurs fonctions, y compris la détection, commutation, stimulation et stockage de données, cependant, les chercheurs doivent encore développer divers types de matériaux fonctionnels électroniques, aux côtés de technologies d'intégration hétérogènes, comme l'impression par transfert. De tels dispositifs sont associés à des procédés de fabrication complexes, incompatibilité d'ingénierie, faible évolutivité et coût élevé. En outre, d'équiper les interfaces homme et machine, les scientifiques des matériaux ont besoin d'une compréhension plus large des paramètres d'interaction, évaluation et communication. Des dispositifs IHM portables sont donc nécessaires à la fois sur les humains et les machines pour former efficacement des voies en boucle fermée. Par conséquent, la recherche dans le domaine des matériaux robotiques vise à développer des dispositifs IHM portables pour combler les lacunes technologiques existantes.
Dans le travail present, Sim et al. développé un ultra-mince, dispositif IHM mécaniquement imperceptible et extensible à porter sur la peau humaine et sur un robot, pour capturer des données physiques et offrir un retour intelligent respectivement, pour créer un système IHM en boucle fermée. Ils ont développé les matériaux sans combiner plusieurs matériaux fonctionnels, dispositifs ou des étapes d'intégration trop hétérogènes. La conception de l'appareil sur l'ultra-mince, sinueux, la configuration à mailles ouvertes avec étirement mécanique a permis à l'utilisateur d'ignorer totalement l'appareil, tandis qu'il extrait les signaux utiles de l'utilisateur. Le dispositif portable collectait des signaux provenant du muscle humain pour guider directement le robot afin de permettre à l'utilisateur de ressentir les sensations ressenties par la main du robot. L'équipe de recherche a étudié collectivement les matériaux et la conception des dispositifs, fabrication et caractérisation pour démontrer les aspects fondamentaux de la nanomembrane d'oxyde métallique pour des applications multifonctionnelles dans les dispositifs IHM.
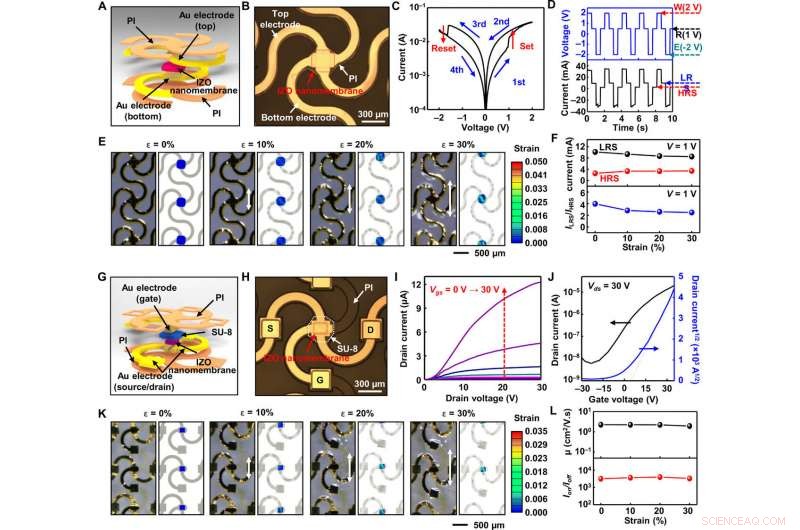
Caractéristiques de la ReRAM et des FET. (A) Vue éclatée schématique de la ReRAM à base de nanomembranes IZO. (B) Image microscopique optique de la ReRAM. (C) Caractéristiques I-V de la commutation bipolaire de la ReRAM. (D) Cycle WRER de la ReRAM. (E) Images séquentielles de la ReRAM à base de nanomembranes IZO sous contrainte et résultats FEA correspondants d'IZO. (F) Courant à LRS et HRS et ILRS/IHRS sous tension. (G) Vue éclatée schématique du FET IZO. (H) Image microscopique optique du FET. (I) Caractéristiques de sortie du FET. (J) Caractéristiques de transfert du FET. (K) Images séquentielles des FET sous contrainte et résultats FEA correspondants d'IZO. (L) Mobilité à effet de champ calculée de l'IZO et de l'ION/IOFF du FET sous contrainte. Crédit :Avancées scientifiques, doi:10.1126/sciadv.aav9653
Sim et al. composé le dispositif IHM avec une matrice ReRAM (mémoire à accès aléatoire) à base de nanomembrane d'oxyde d'indium (IZO), Réseau FET (transistor à efficacité de champ), capteurs de température distribués, capteurs UV, capteurs de contrainte et simulateurs thermiques à base d'or (Au). Ils ont conçu tous les appareils sur une couche mince (~2 µm) de polyimide (PI) par revêtement par centrifugation sur un substrat de maintien en verre rigide pour permettre la libération facile de l'appareil pour qu'il soit autonome. Après de nombreuses étapes d'ingénierie complexes, ils ont terminé la fabrication du dispositif en l'immergeant dans un tampon d'attaque à l'oxyde (BOE) pour libérer le dispositif de la plate-forme en verre. A l'aide de papier sulfurisé, les scientifiques ont ensuite transféré l'appareil sur un bras humain sans adhésif supplémentaire. Ils ont utilisé la microscopie électronique à balayage pour montrer que le polymère cutané ne subissait pas de délaminage au contact de la peau. Pour former un système IHM en boucle fermée entre l'homme et la machine, les scientifiques ont également développé une peau prothétique composée de poly(diméthylsiloxane) (PDMS) et d'un ensemble de capteurs pour imiter les fonctions sensorielles de la peau humaine et l'ont mis en œuvre sur une main de robot.
Sim et al. effectué la caractérisation détaillée du semi-conducteur d'oxyde nanomembranaire IZO traité sol-gel-sur-polymère, ce qui était essentiel pour réaliser de multiples fonctionnalités sans intégration hétérogène. Étant donné que les périphériques de stockage de données tels que la mémoire faisaient partie intégrante des IHM portables ; les scientifiques ont construit la ReRAM extensible à base de nanomembranes IZO avec une structure en sandwich Au/IZO/Au avec encapsulation PI (polyimide). Sous une tension suffisante, ils ont créé des ions d'oxygène et des lacunes d'oxygène pour former un filament conducteur entre les deux électrodes pour une transition de courant drastique de l'état de haute résistance (HRS) à l'état de faible résistance (LRS). Lorsqu'ils ont appliqué une polarisation inverse à une tension spécifique, les lacunes d'oxygène se sont neutralisées, provoquant la rupture du filament conducteur et une diminution drastique du courant. Sim et al. effectué des cycles d'écriture-lecture-effacement-écriture (WRER) et des tests de rétention pour évaluer la fiabilité de la ReRAM à base de nanomembranes IZO, où les résultats ont montré un fonctionnement stable sans dégradation.
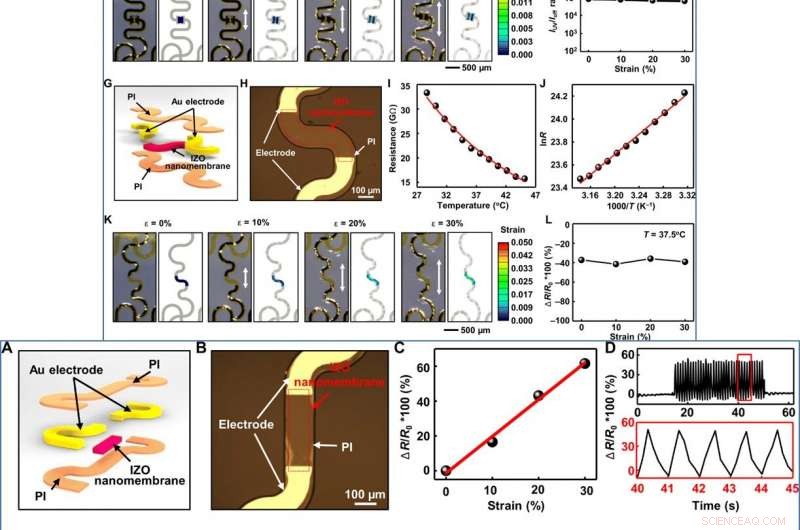
EN HAUT :Caractéristiques des capteurs UV et de température. (A) Vue éclatée schématique du capteur UV à base de nanomembrane IZO. (B) Image microscopique optique du capteur UV. (C) Caractéristiques I-V du capteur UV. (D) Courbe d'étalonnage du capteur UV IZO. (E) Images séquentielles du capteur UV sous contrainte et résultats FEA correspondants d'IZO. (F) IUV/Idark pour la lumière UV sous contrainte. (G) Vue éclatée schématique du capteur de température IZO. (H) Image microscopique optique du capteur de température. (I) Courbe d'étalonnage du capteur de température. (J) Tracé de lnR par rapport à 1000/T du capteur de température. (K) Images séquentielles du capteur de température IZO sous contrainte et résultats FEA correspondants d'IZO. (L) Changement de résistance relative du capteur de température sous contrainte. EN BAS :Caractéristiques du capteur de contrainte. (A) Vue éclatée schématique du capteur de contrainte IZO. (B) Image microscopique optique du capteur de contrainte. (C) Courbe d'étalonnage du capteur de contrainte. (D) Changement de résistance relative du capteur de contrainte sous étirement et relaxation cycliques. (E) Images séquentielles du capteur de contrainte sous contrainte et résultats FEA correspondants d'IZO. Crédit :Avancées scientifiques, doi:10.1126/sciadv.aav9653
Ils ont confirmé l'effet de la contrainte mécanique sur les performances de l'appareil en testant la ReRAM sous différents niveaux d'étirement mécanique à l'aide d'une civière sur mesure. Les résultats ont montré que le semi-conducteur subissait une contrainte minimale et négligeable lorsqu'il était étiré, reflétant la conception rationnelle de l'appareil. Les résultats ont indiqué la capacité du dispositif ReRAM à fonctionner de manière stable sous contrainte mécanique sans dégradation substantielle. Le FET utilisé dans l'appareil a également formé un bloc de construction fondamental pour l'interface et l'électronique de commutation des IHM.
Les scientifiques ont ensuite testé le capteur UV ultrafin du polymère portable et sa capacité à surveiller l'exposition aux UV pour des applications visant à réduire le risque de maladies de la peau. De la même manière, ils ont testé les effets de la température de la peau, un indicateur important de la santé en mesurant la résistance de la thermistance extensible ultrafine à différentes températures. Ils ont calculé que le coefficient de température était comparable aux thermistances volumineuses disponibles dans le commerce. L'équipe de recherche a également développé un capteur de contrainte à base de nanomembrane IZO pour la communication entre un humain et un robot afin de mettre en évidence la polyvalence du matériau IZO. Sim et al. ont comparé les résultats expérimentaux avec l'analyse par éléments finis (FEA) pour calculer le profil de déformation de la zone de détection IZO sous différents niveaux d'étirement mécanique. Les simulations concordent bien avec les résultats expérimentaux.
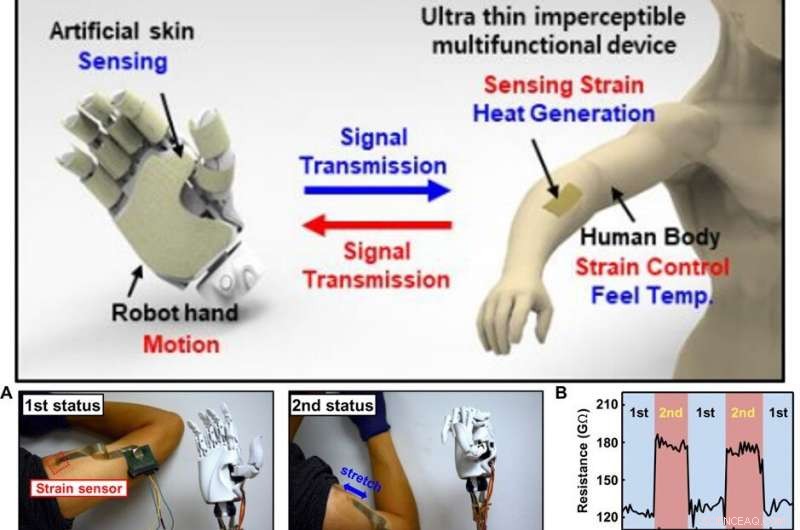
EN HAUT :Illustration schématique d'une IHM en boucle fermée. EN BAS :IHM portable en boucle fermée. (A) Image représentative du mouvement humain pour contrôler la main robotique. (B) Changement de résistance du capteur de contrainte sur la peau humaine sous différents mouvements humains. (C) Image représentative de l'imitation du mouvement humain. (D) Changement de résistance du capteur de contrainte sur l'imitation du mouvement humain. (E) Image représentative de la main robotique, avec le capteur de température touchant la main humaine. (F) Changement de résistance du capteur de température sur la main robotique pendant que la main humaine tient le robot. (G) Vue éclatée schématique du microchauffeur résistif. (H) Cartographie de la température IR du microchauffeur. (I) Changement de température dynamique sous différentes tensions appliquées. (J) Courbe d'étalonnage du microchauffeur. Crédit photo :Kyoseung Sim, Université de Houston. Crédit :Avancées scientifiques, doi:10.1126/sciadv.aav9653
Après avoir testé les différentes fonctions de l'appareil multifonctionnel, Sim et al. a démontré la multifonctionnalité des IHM interactives en boucle fermée. Lorsque des capteurs portables sur la peau humaine ont détecté des signaux tels que le mouvement humain induit par la contrainte, les signaux détectés pourraient contrôler le mouvement de la main robotique. Par exemple, lorsque l'équipe de recherche a placé le capteur de contrainte IZO sur l'épaule humaine, elle a détecté une contrainte due au mouvement du bras humain ou lorsque l'utilisateur a saisi un objet. En parallèle, la peau prothétique basée sur le capteur de température IZO de la main robotique a détecté la température de l'environnement extérieur ou de l'objet saisi pour déterminer la tension apte à appliquer à un stimulateur thermique doux sur la peau humaine pour transmettre la sensation. Sur la base d'une série de telles interactions coordonnées, les scientifiques ont créé un système IHM interactif en boucle fermée.
De cette façon, Kyoseung Sim et ses collègues ont conçu une nanomembrane d'oxyde métallique IZO traitée sol-gel-sur-polymère et ont montré sa polyvalence par rapport aux dispositifs de mémoire souple ultrafins, transistor, capteurs de température, capteurs de contrainte et capteurs UV. Ils ont formé le dispositif multifonctionnel simultanément dans un processus en une seule étape sans aucune intégration hétérogène. Les capteurs portables ultra-minces et extensibles compatibles avec l'électronique, la peau prothétique et le dispositif d'actionnement pour les interfaces homme-robot ont prouvé la faisabilité du système IHM en boucle fermée. Une telle configuration ouvrira la voie à des solutions rentables, fabrication évolutive et dispositifs IHM portables capables d'une intégration transparente avec l'utilisateur. Les scientifiques envisagent que l'IHM portable deviendra une technologie vitale avec des capacités améliorées, confort et commodité pour une collaboration efficace entre les machines et les humains.
© 2019 Réseau Science X