Ensemble codé de forme de microactionneurs magnétiques sous la forme d'un microvéhicule. Crédit :Nature Materials, doi:10.1038/s41563-019-0407-3
L'assemblage colloïdal dirigé sur le terrain et automoteur peut être utilisé pour construire des micromachines pour effectuer des mouvements et des fonctions complexes, bien que leur intégration en tant que composants hétérogènes avec des structures spécifiées, la dynamique et les fonctions au sein des micromachines est un défi. Dans une étude récente sur Matériaux naturels , Yunus Alapan et ses collègues des départements de l'intelligence physique et des matériaux complexes en Allemagne et en Suisse ont décrit l'auto-assemblage dynamique de micromachines mobiles avec les configurations souhaitées en utilisant des interactions physiques préprogrammées entre les unités structurelles et motrices.
Ils ont conduit l'assemblage à l'aide d'interactions diélectrophorétiques (DEP) codées dans une forme tridimensionnelle (3-D) de pièces individuelles. Ils ont suivi le protocole en assemblant les nouvelles micromachines avec des pièces motrices magnétiques et automotrices pour une locomotion reconfigurable et des degrés de liberté supplémentaires non réalisés jusqu'à présent avec les microrobots monolithiques conventionnels. La stratégie d'assemblage sélectif sur site était polyvalente et pouvait être démontrée sur différents, reconfigurable, micromachines mobiles hiérarchiques et tridimensionnelles (3D). Les scientifiques anticipent les principes de conception présentés dans le travail pour faire avancer et inspirer le développement de micromachines plus sophistiquées intégrées dans des systèmes hiérarchiques multi-échelles.
Les micromachines mobiles offrent un potentiel important pour sonder et manipuler le monde microscopique et créer des ordres/assemblages fonctionnels à l'échelle micro et méso. Une micromachine peut être composée de plusieurs pièces, matériaux ou chimies pour répondre à de multiples fonctions, y compris l'actionnement, sentir, transport et livraison. Les modes de fonctionnement et les performances d'une micromachine peuvent être dictés par l'organisation collective et l'interaction de ses constituants.
Par exemple, les particules magnétiques interagissant sous des champs magnétiques tournants peuvent s'assembler en chaînes ou roues capables de se déplacer à proximité de surfaces solides. De la même manière, les scientifiques ont développé des micronageurs activés par la lumière dans des cristaux vivants et ont permis l'auto-rotation en régulant la consommation de produits chimiques. Pour concevoir une complexité plus élevée, les bio-ingénieurs et les scientifiques des matériaux doivent permettre des interactions physiques programmables dans des pièces individuelles pour des actions spécifiques à la forme et au matériau sous des influences externes. Les exemples incluent le développement de microstructures composites assemblées sous forme de colloïdes à l'aide de moules électriques et magnétiques virtuels.
Alors que de nouvelles approches se sont révélées prometteuses pour construire des assemblages structurels programmables, ceux-ci restent à traduire en ensembles mobiles de micromachines. Dans le travail present, Alapan et al. a introduit un processus d'assemblage dirigé pour construire des micromachines composées mobiles utilisant des forces diélectrophorétiques (DEP) pour coder une distribution contrôlée avec précision des gradients de champ électrique autour d'un corps en modulant sa géométrie 3-D.
Les résultats ont montré des microactionneurs directionnels et sélectifs du site avec une stratégie d'assemblage polyvalente à codage de forme. Ils ont montré la possibilité d'un renforcement amélioré entre les actionneurs et le corps en réglant les forces DEP pour assurer le contrôle de la rotation. Alapan et al. a mis en œuvre une nouvelle stratégie de conception d'assemblage dirigé pour contrôler la dynamique opérationnelle entre les composants fonctionnels à l'aide de forces DEP codées en forme. Le travail expérimental fournira un espace de conception riche pour développer des micromachines fonctionnelles et des microbots mobiles pour effectuer des tâches complexes.
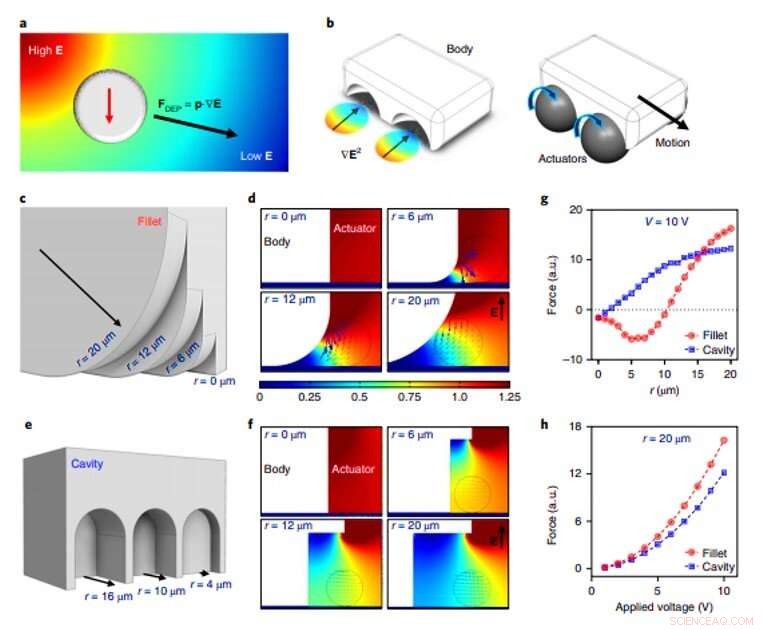
Encodage spatial des sites d'attraction DEP en modulant la géométrie 3D. (une), Une particule polarisée négativement, avec une permittivité relative inférieure à celle du milieu (εp
Alapan et al. a d'abord programmé les gradients de champ autour d'une construction pour piloter l'assemblage de pièces de micromachine aux emplacements souhaités à l'aide d'interactions DEP. Le principe de fonctionnement du dispositif sous champs électriques reposait sur la régulation en fonction de la forme des champs électriques autour des corps polarisables de la micromachine assemblée. Pour programmer les gradients locaux, ils ont étudié comment les champs non électriques pouvaient être modulés autour de différentes géométries.
Les scientifiques ont ensuite démontré l'auto-assemblage contrôlé de micromachines mobiles influencées par des champs électriques, où ils se sont d'abord concentrés sur l'assemblage d'un simple microvéhicule. Le microvéhicule expérimental contenait un grand corps sphérique diélectrique non magnétique et plusieurs microactionneurs magnétiques plus petits organisés autour du corps plus grand. Lorsqu'ils ont appliqué un champ électrique dans l'axe Z, le corps non magnétique a généré des gradients de champ électrique locaux pour attirer des microactionneurs plus petits autour de ses pôles. Les actionneurs magnétiques nouvellement assemblés ont servi de roues de propulsion et Alapan et al. pourrait diriger le microvéhicule en changeant la direction du champ magnétique en appliquant un champ magnétique tournant verticalement.
Alors qu'ils ont augmenté la vitesse du microvéhicule en augmentant le nombre de microactionneurs, lorsque la tension dans le système augmentait, la vitesse du microvéhicule diminuait à la place. Les scientifiques ont supposé que cela était dû à un couplage mécanique accru entre les microparticules et le substrat lors des interactions DEP. Les chercheurs ont utilisé la méthode pour capturer aléatoirement, particules non magnétiques avec microactionneurs magnétiques par application d'un champ électrique, puis les a traduits dans une nouvelle position à l'aide d'un champ magnétique rotatif pour la libération lors de la désactivation du champ électrique.
Assemblage et translation d'un microvéhicule composé avec actionneurs magnétiques. Crédit :Nature Materials, doi:10.1038/s41563-019-0407-3
Pour contrôler les degrés de liberté en rotation du microvéhicule, Alapan et al. pourrait réguler la force des forces DEP attractives entre le corps passif et les microactionneurs pour régler leur couplage mécanique. Par exemple, à basse tension, les faibles forces d'attraction DEP ont conduit à un phénomène de couplage basé sur une lubrification lâche permettant aux microactionneurs de se déplacer librement autour du pôle. Les articulations rotatives développées dans l'étude peuvent devenir cruciales pour des systèmes biologiques spécifiques lors du développement de molécules synthétiques, nano- et micromachines pour application à la transmission mécanique de l'énergie.
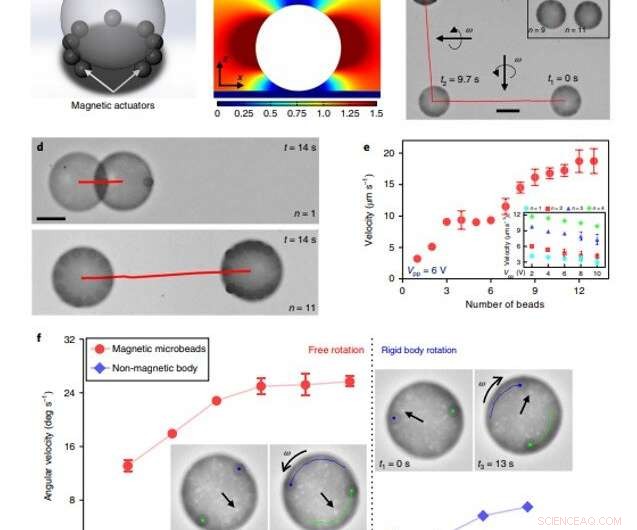
Assemblage réversible de microactionneurs magnétiques à corps amagnétique utilisant les forces DEP. (une, b), Plusieurs microparticules magnétiques (diamètre 10 µm) peuvent être attirées à proximité d'un corps non magnétique sphérique (diamètre 60 µm) (a) vers des régions avec une intensité de champ électrique plus faible autour des pôles (b). Barre de couleur intensité de champ électrique normalisée (E/E0)2. (c), Le microrobot assemblé se traduit par le mouvement de roulement des microactionneurs sous un champ magnétique tournant (ω). Le microrobot peut être dirigé en changeant la direction du champ magnétique appliqué. Barre d'échelle, 50µm. Encart, le nombre de microactionneurs magnétiques (n) assemblés autour du corps peut être réglé par la capture contrôlée de microactionneurs. (ré, e), Le nombre de microactionneurs magnétiques, ainsi que la tension appliquée (encart), déterminer la vitesse des microrobots assemblés. Barre d'échelle en d, 30 µm. (F), Lorsqu'un champ magnétique de rotation dans le plan x-y est appliqué, les actionneurs tournent librement autour du corps non magnétique à basse tension. Avec une tension accrue, des actionneurs couplés mécaniquement au corps amagnétique, ce qui entraîne la rotation du corps rigide du microrobot. Les barres d'erreur indiquent s.d. de trois répétitions expérimentales. Crédit :Nature Materials, doi:10.1038/s41563-019-0407-3
Les chercheurs ont ensuite réalisé l'auto-assemblage programmable de micromachines mobiles avec des interactions physiques codées en forme en concevant des cadres de micromachines avec des géométries 3D spécifiques pour générer des gradients de champ électrique. Le cadre 3-D a attiré sélectivement les microactionneurs vers les emplacements souhaités sur le cadre de la micromachine lui-même que les scientifiques ont fabriqué à l'aide de la lithographie à deux photons. Pour la première conception, les scientifiques ont créé une microvoiture avec des poches à quatre roues pour générer des forces DEP et guider l'assemblage de microactionneurs magnétiques dans les poches. Ils ont effectué l'auto-assemblage à la demande de la microvoiture quelques secondes après l'application d'un champ électrique pour la libre rotation des roues magnétiques à l'intérieur des poches en raison d'un champ magnétique tournant verticalement. Quand ils ont allumé le champ électrique à une valeur élevée, les microactionneurs magnétiques sont auto-assemblés dans les sites d'amarrage pour un couplage rigide entre le châssis du micro-rotor et les microactionneurs magnétiques. Lorsqu'ils ont appliqué un champ magnétique tournant horizontalement, l'ensemble micromoteur tournait comme un corps rigide.
Les scientifiques ont élargi le prototype pour construire des micromachines reconfigurables alimentées par des micromoteurs automoteurs. Pour ça, ils ont conçu des micromachines assemblées avec de la silice Janus automotrice (SiO

À DROITE :Assemblage reconfigurable de micromachines à codage de forme avec des microactionneurs automoteurs pour une locomotion à fréquence réglable. (une), Les microparticules Janus SiO2 avec un capuchon Au peuvent se déplacer activement sur la base du sDEP à hautes fréquences et de l'ICEP à basses fréquences. Le sens de locomotion est vers le cap Au dans le sDEP et inverse dans l'ICEP. (b), La particule Janus subit une force DEP vers des amplitudes de champ électrique plus élevées et plus faibles à hautes et basses fréquences, respectivement. (c–e), Une carrosserie de microvoiture avec des sites d'assemblage hémicylindriques et filetés est conçue pour générer une attraction sélective réglable en fréquence des microactionneurs. Les particules de Janus sont attirées vers la ligne équatoriale des hémicylindres aux hautes fréquences et vers le site du congé aux basses fréquences. Barre de couleur intensité de champ électrique normalisée (E/E0)2. La propulsion des particules de Janus assemblées aux sites hémicylindriques entraîne une rotation de la caisse de la microvoiture, tandis que l'assemblage au site du congé génère une translation linéaire. F, g, La reconfiguration à la demande du mode de locomotion est obtenue en réglant la fréquence et en réorganisant la disposition spatiale de l'ensemble. Barres d'échelle, 25 µm. GAUCHE :Assemblage hiérarchique de plusieurs micromachines via des interactions DEP codées en forme. (a–c), L'assemblage hiérarchique en deux étapes se fait par l'assemblage des unités de micromachine 1 et 2 avec des particules de Janus automotrices (i) et par l'assemblage latéral de l'unité 1 et de l'unité 2 (ii). Les unités de micromachines sont conçues pour un assemblage latéral sélectif, où le dessous des rebords de la plus grande unité 2 génère des champs électriques faibles qui attirent la plus petite unité 1. La barre de couleur a normalisé l'intensité du champ électrique (E/E0)2. (ré, e), L'assemblage en parallèle de micromachines mobiles maintient le mouvement linéaire des unités, tandis que l'assemblage anti-parallèle entraîne un mouvement de rotation. Barres d'échelle, 25 µm. Crédit :Nature Materials, doi:10.1038/s41563-019-0407-3
Alapan et al. étendu les interactions DEP codées par la forme observées pour définir les interactions physiques entre les micromachines mobiles en ouvrant la voie à des assemblages multi-machines hiérarchiques. Comme preuve de principe, ils ont conçu un assemblage hiérarchique à deux niveaux entre les micromachines constitutives.
Les scientifiques ont étendu la conception introduite dans le présent travail à la manipulation de micro-actionneurs en 3D et à l'assemblage de micromachines avec un potentiel important d'application sur des dispositifs de laboratoire sur puce pour faciliter le transport continu, tri, manipulation numérique de micro-objets et génération de flux microfluidiques. De cette façon, Yunus Alapan et ses collègues ont conçu et mis en œuvre un auto-assemblage programmable à l'aide d'un assemblage dynamique dirigé par la forme de micromachines à partir de sous-unités structurelles et motrices modulaires pour fournir un contrôle sans précédent sur la dynamique et les fonctions. La méthode peut fournir une solution pour concevoir des microrobots multifonctionnels/matériaux puisque les scientifiques ont réussi à incorporer les composants hétérogènes pour la détection, chargement et actionnement de la cargaison en une seule étape.
Pour les applications sans champs électriques telles que les applications biomédicales in vivo, les scientifiques auront pour objectif d'optimiser et de s'appuyer sur l'assemblage irréversible de micro-composants pour des performances optimisées. Le travail recèle un potentiel important de développement multifonctionnel, des micromachines reconfigurables et des systèmes hiérarchiques complexes inspirés du vivant en science des matériaux pour des applications en microrobotique, science colloïdale, médecine et microsystèmes autonomes.
© 2019 Réseau Science X