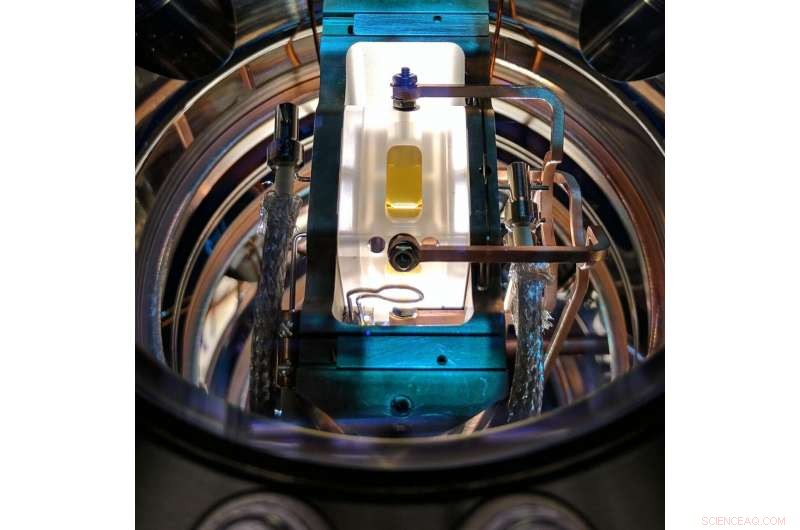
Un piège à ions utilisé pour la recherche au Sydney Nanoscience Hub Quantum Control Laboratory à l'Université de Sydney. Crédit :Université de Sydney
Des scientifiques de l'Université de Sydney ont adapté des techniques de véhicules autonomes et de robotique pour évaluer efficacement les performances des dispositifs quantiques, un processus important pour aider à stabiliser les technologies émergentes.
Il a été démontré expérimentalement que l'approche innovante surpasse d'un facteur trois la caractérisation simpliste de ces environnements, avec un résultat beaucoup plus élevé pour des environnements simulés plus complexes.
« En utilisant cette approche, nous pouvons cartographier le « bruit » provoquant des variations de performances entre les appareils quantiques au moins trois fois plus rapidement qu'une approche par force brute, " a déclaré l'auteur principal Riddhi Gupta, un doctorat étudiant à l'École de physique. "Évaluer rapidement l'environnement sonore peut nous aider à améliorer la stabilité globale des dispositifs quantiques."
La recherche a été publiée dans la revue partenaire Nature Informations quantiques .
L'informatique quantique en est encore à ses premiers stades de développement, mais promet de révolutionner la technologie en résolvant des problèmes dépassant le cadre de l'informatique classique.
L'un des obstacles au développement de ces systèmes à l'échelle pratique est de surmonter les imperfections du matériel. Les unités de base de la technologie quantique—bits quantiques, ou qubits - sont très sensibles aux perturbations de leur environnement, comme le « bruit » électromagnétique, et présentent des variations de performances qui réduisent leur utilité.
Mme Gupta, fait également partie du Centre d'excellence ARC pour les systèmes quantiques d'ingénierie, a repris des techniques d'estimation classiques utilisées en robotique et les a adaptées pour améliorer les performances du matériel. Ceci est réalisé grâce à l'automatisation efficace des processus qui cartographient à la fois l'environnement et les variations de performances entre les grands dispositifs quantiques.
"Notre idée était d'adapter les algorithmes utilisés en robotique qui cartographient l'environnement et placent un objet par rapport à d'autres objets dans leur terrain estimé, ", a-t-elle déclaré. "Nous utilisons efficacement certains qubits dans l'appareil comme capteurs pour aider à comprendre le terrain classique dans lequel d'autres qubits traitent l'information."
En robotique, les machines reposent sur la localisation et la cartographie simultanées, ou SLAM, algorithmes. Des appareils tels que les aspirateurs robotiques cartographient en permanence leurs environnements, puis estiment leur emplacement dans cet environnement afin de se déplacer.
La difficulté d'adapter les algorithmes SLAM aux systèmes quantiques est que si vous mesurez, ou caractériser, la performance d'un seul qubit, vous détruisez ses informations quantiques.
Ce que Mme Gupta a fait, c'est développer un algorithme adaptatif qui mesure les performances d'un qubit et utilise ces informations pour estimer les capacités des qubits proches.
« Nous avons appelé cela « la cartographie du bruit pour les architectures quantiques ». Plutôt que d'estimer l'environnement classique pour chaque qubit, nous sommes en mesure d'automatiser le processus, réduire le nombre de mesures et de qubits nécessaires, qui accélère l'ensemble du processus, ", a déclaré Mme Gupta.
Dr Cornélius Hempel, dont l'équipe expérimentale a fourni à Mme Gupta des données d'expériences sur une chaîne unidimensionnelle d'ions piégés, a déclaré qu'il était heureux de voir une triple amélioration, même dans la cartographie d'un si petit système quantique.
"Toutefois, lorsque Riddhi a modélisé ce processus dans un système plus vaste et plus complexe, l'amélioration de la vitesse était aussi élevée que vingt fois. C'est un excellent résultat étant donné que l'avenir du traitement quantique se trouve dans des appareils plus grands, " il a dit.
Le superviseur de Mme Gupta est le professeur Michael J. Biercuk, fondateur de la société de technologie quantique Q-CTRL et directeur du laboratoire de contrôle quantique de l'Université de Sydney dans le Sydney Nanoscience Hub.
Il a déclaré :« Ce travail est une démonstration passionnante que les connaissances de pointe en robotique peuvent directement façonner l'avenir de l'informatique quantique. Il s'agissait d'une première étape pour unifier les concepts de ces deux domaines, et nous voyons un avenir très prometteur pour le développement continu de l'ingénierie de contrôle quantique."