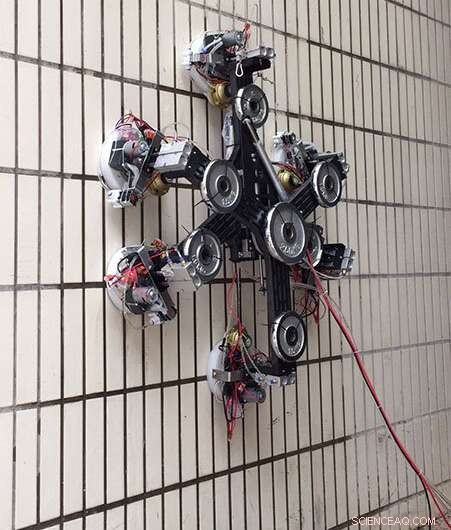
Un robot grimpeur utilise la méthode de différence de pression nulle pour former une aspiration. Crédit :Xin Li et Kaige Shi
Des unités d'aspiration sous vide spécialement conçues permettent aux humains d'escalader les murs. Les scientifiques ont développé une unité d'aspiration qui peut être utilisée sur des surfaces rugueuses, peu importe la texture, et qui a des applications dans le développement de robots d'escalade et de bras robotiques avec des capacités de préhension.
Les méthodes traditionnelles d'aspiration sous vide et les dispositifs d'aspiration sous vide précédents ne peuvent pas maintenir l'aspiration sur des surfaces rugueuses en raison d'une fuite de vide, ce qui entraîne une panne d'aspiration.
Les chercheurs Xin Li et Kaige Shi ont développé une méthode de différence de pression nulle (ZPD) pour améliorer le développement d'unités d'aspiration sous vide. Leur méthode a surmonté les limitations de fuite en utilisant un anneau d'eau rotatif à grande vitesse entre la surface et la ventouse pour maintenir le vide. Ils discutent de leur travail cette semaine Physique des fluides .
« Il existe de nombreuses applications de notre conception, mais nous pensons que le robot grimpeur sera le plus utile, " a déclaré Li. " Par rapport à d'autres robots d'escalade, le robot avec notre unité d'aspiration à base de ZPD obtient une amélioration surprenante des performances."
La force centrifuge de l'eau en rotation élimine la différence de pression à la limite de la zone de vide pour éviter les fuites de vide. Il peut maintenir une pression de vide élevée à l'intérieur de la ventouse.
Leur unité d'aspiration ZPD est économe en énergie et plus petite et plus légère que les unités d'aspiration traditionnelles. Les chercheurs ont testé leur unité avec trois tailles d'aspiration et applications différentes :sur un bras robotisé pour saisir et manipuler des objets, sur un robot d'escalade hexapode et comme un appareil d'escalade de type Spider-Man.
"La prochaine étape de cette recherche est de réduire la consommation d'eau. Si la consommation d'eau peut être réduite, l'unité d'aspiration fonctionnera très longtemps avec peu d'eau afin que le robot grimpeur puisse transporter sa propre eau au lieu d'être connecté à une alimentation, " dit Li.