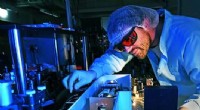
Des chercheurs en Chine ont démontré un mécanisme de préhension robotique qui imite la façon dont une anémone de mer attrape sa proie. Le tore bionique capture et libère les objets en frisant sa peau. La pince est non seulement relativement bon marché et facile à produire, mais peut également saisir une variété d'objets de différentes tailles, formes, poids et matériaux. Ils discutent de leur travail dans Applied Physics Letters de cette semaine. Cette image montre un prototype simple montrant l'adaptabilité de la pince à divers objets. Crédit :Weifeng Yuan
La plupart des mécanismes de préhension robotiques à ce jour reposent sur des doigts ou des appendices humains, qui peinent parfois à apporter la touche fine, flexibilité ou rentabilité nécessaires dans certaines circonstances pour conserver des objets. Des travaux récents cherchent à ouvrir la voie aux robots de préhension à partir d'une source improbable :l'anémone de mer en forme de beignet.
Des chercheurs de l'Université des sciences et technologies du Sud-Ouest et de l'Université Tsinghua en Chine ont démontré un mécanisme de préhension robotique qui imite la façon dont une anémone de mer attrape sa proie. Le tore bionique capture et libère les objets en frisant sa peau. La pince est non seulement relativement bon marché et facile à produire, mais peut également saisir une variété d'objets de différentes tailles, formes, poids et matériaux. Ils discutent de leur travail cette semaine Lettres de physique appliquée .
« Dans l'industrie, les mains adroites à plusieurs doigts sont largement utilisées pour effectuer des tâches de saisie. Cependant, ces effecteurs finaux sont constitués d'un grand nombre de composants, comme les articulations et les capteurs, qui sont difficiles à contrôler, ", a déclaré l'auteur Weifeng Yuan.
La peau en caoutchouc thermoplastique qui tapisse l'extérieur de l'anneau rempli de liquide roule vers l'intérieur lorsque la peau intérieure de la pince subit une force de traction, aspirer n'importe quelle cible attrapée.
Les chercheurs peuvent ajuster diverses caractéristiques du tore, tels que le sens de laminage et la longueur de la peau, pour contrôler si les articles sont engloutis, avalé ou relâché.
"Nous avons découvert que les anémones de mer peuvent capturer des créatures marines de différentes formes et tailles, nous avons donc décidé d'étudier le mécanisme de la stratégie de prédation, et nous pensions que l'étude serait utile à la conception de préhenseurs souples adaptatifs, " dit Yuan.
Le groupe a fait la démonstration de l'appareil en s'accrochant à des objets, allant d'un morceau de tissu à un téléphone portable à un bécher en verre rempli de liquide.
Yuan a déclaré qu'une pince flexible a le potentiel de saisir des objets fragiles dans des espaces étroits ou extrêmes, environnements à haute pression, comme la collecte d'échantillons d'organismes d'eau profonde ou des tuyaux de transport. Quoi de plus, le préhenseur peut également être construit à l'échelle nanométrique pour manipuler des cellules individuelles. Yuan voit un potentiel dans le développement d'instruments chirurgicaux.
"Notre préhenseur peut saisir une barre d'acier d'une table une minute et un œuf d'un panier la suivante sans réinitialiser les paramètres de contrôle, " dit Yuan.
Le groupe espère continuer à étoffer le potentiel d'un appareil aussi unique, comme augmenter le rapport résistance/poids en utilisant de l'air au lieu de liquides.