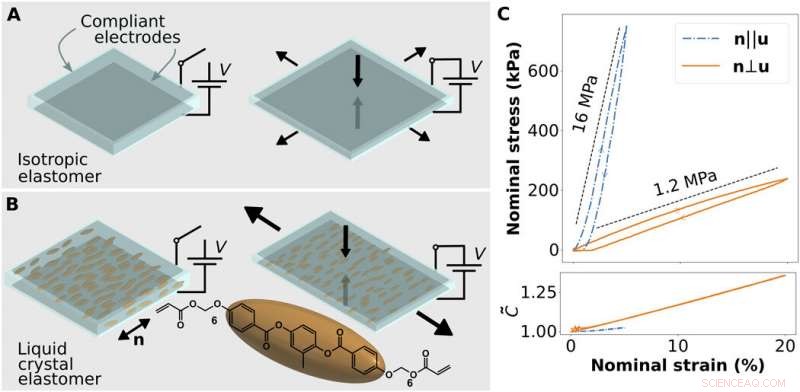
Schéma de l'appareil, mécanique, et caractérisation électrique. (A) Schéma d'un actionneur DE isotrope traditionnel dans les états off et on. (B) Schéma d'un actionneur LCE diélectrique aligné uniaxial (DLCEA) dans les états éteints et allumés. Alignement moléculaire des cristaux liquides ; le directeur, m, est indiqué par une flèche à double tête et définit la direction la plus rigide du LCE. Lorsqu'il est actionné par une tension, V, le matériau s'amincit et s'étire perpendiculairement à l'alignement plus que parallèlement au directeur. (C) La contrainte mécanique DLCEA et la réponse de capacité normalisée (C∼) à la déformation sur le régime linéaire DLCEA sont caractérisées à un taux de déformation de 0,1% par seconde. Crédit :Avancées scientifiques, doi:10.1126/sciadv.aay0855
Les scientifiques des matériaux visent à utiliser des robots mous bioinspirés pour effectuer des interactions avancées entre les humains et les robots, mais la technologie associée reste à développer. Par exemple, les actionneurs souples doivent fonctionner rapidement avec force pour fournir des changements de forme programmables et les dispositifs doivent être faciles à fabriquer et économes en énergie pour les applications non attachées. Dans un nouveau rapport sur Avancées scientifiques , Zoey S. Davidson et une équipe de recherche interdisciplinaire dans les départements d'intelligence physique, Science et génie des matériaux, et l'École de médecine en Allemagne, États-Unis et Turquie, combiné plusieurs caractéristiques d'intérêt en utilisant deux systèmes de matériaux actifs distincts pour construire des robots mous.
Les scientifiques ont intégré un actionnement rapide et hautement efficace avec des élastomères diélectriques (DE) et une programmabilité de forme dirigée à l'aide d'élastomères à cristaux liquides (LCE). En utilisant des techniques de photoalignement descendantes, ils ont ensuite programmé l'alignement moléculaire et localisé l'anisotropie élastique géante dans les élastomères à cristaux liquides. Les chercheurs ont développé des monolithes en élastomère à cristaux liquides actionnés linéairement avec des taux de déformation supérieurs à 120 pour cent, par seconde, et une efficacité de conversion énergétique de 20 % lors du déplacement de charges supérieures à 700 fois le poids de l'élastomère. Le mécanisme permettra de nouvelles opportunités de recherche dans la programmabilité et l'efficacité des formes miniaturisées ainsi que des degrés de liberté accrus pour les applications en robotique douce dans la recherche multidisciplinaire.
Les chercheurs en robotique des matériaux considèrent que les actionneurs conformes sont la clé manquante pour former des interfaces humaines et robotiques efficaces. Les actionneurs souples conformes seront idéalement très efficaces, maintenir le rapport force-poids, capacité de travail et programmabilité de forme pour accomplir des fonctions complexes. Les actionneurs souples avec de telles propriétés fonctionneront un peu comme un muscle artificiel avec des applications avancées dans l'aérospatiale, robotique, Équipement médical, dispositifs de récupération d'énergie et dans les wearables. Parmi les variétés d'actionneurs souples explorées, les élastomères diélectriques (ED) sont les plus prometteurs. En parallèle, les élastomères à cristaux liquides (LCE) peuvent subir une déformation mécanique réversible en utilisant la lumière et l'actionnement thermique près de la température de transition de phase. Les progrès du photoalignement et de la microfabrication ont permis aux scientifiques de préprogrammer l'alignement des cristaux liquides dans des régions microscopiques pour un morphing de forme complexe. Cependant, les mécanismes existants nécessitent des méthodes de fabrication en plusieurs étapes, tandis que les efforts pour acheminer l'énergie électrique au travail mécanique à l'aide du LCE sont limités en raison de la faible contrainte qu'ils génèrent.
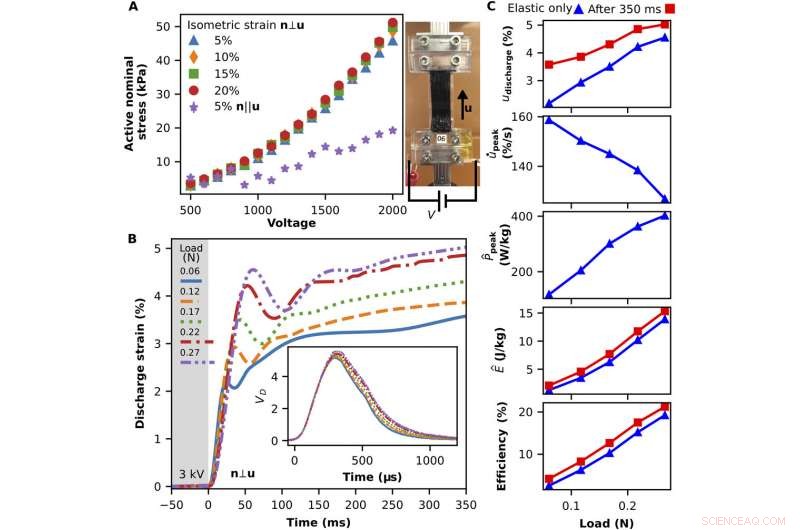
La caractérisation du DLCEA uniaxial démontre les capacités d'un dispositif d'actionneur DLCEA. (A) Tests isométriques (déformation constante). Réduction active de la contrainte nominale mesurée avec diverses déformations isométriques initiales (u) pour les dispositifs assemblés avec le directeur LCE n⊥u et n‖u et une photographie d'un dispositif DLCEA assemblé avec n⊥u. (B) Tests isotoniques (force constante). Trajectoires de déformation de décharge contractile sous diverses charges mesurées par une caméra à grande vitesse avec des tensions d'actionnement de 3 kV. Encart :Les mesures correspondantes de la décharge électrique. (C) Les caractéristiques fondamentales de l'actionneur sont calculées à partir de la trajectoire de contraction et de la mesure du courant de décharge trouvé en (B), y compris la souche (u), taux de déformation maximal (u˙peak), puissance spécifique crête (Pˆpeak), énergie spécifique (Eˆ), et efficacité. Crédits photo :Zoey S. Davidson. Crédit :Avancées scientifiques, doi:10.1126/sciadv.aay0855
Dans le travail present, Davidson et al. LCE à motifs (élastomères à cristaux liquides) pour adapter la variation spatiale de la conformité mécanique (transfert d'une force d'entrée et d'un déplacement par déformation élastique du corps) et développer des actionneurs en élastomère diélectrique plus efficaces avec pré-programmabilité et direction d'actionnement (compression). En général, Les actionneurs DE (élastomère diélectrique) fonctionnent en utilisant l'attraction électrostatique entre deux électrodes conformes créées sur les côtés opposés d'un DE isotrope pour concevoir une résistance-condensateur variable. La haute tension appliquée aux électrodes conformes peut induire une pression électrostatique connue sous le nom de contrainte de Maxwell pour déformer le DE ; pour l'actionnement électrique. Ce mécanisme peut produire une efficacité de fonctionnement et une vitesse d'actionnement supérieures à celles des LCE. Cependant, malgré des résultats impressionnants, Les actionneurs DE n'ont pas encore été largement utilisés dans la robotique douce en raison des défis existants qui peuvent être surmontés en utilisant des matériaux innovants pour construire la prochaine génération, DE hautes performances avec programmabilité de forme.
Davidson et al. exploré directement la grande anisotropie mécanique (pour améliorer la localisation des contraintes) des matériaux LCE à l'aide d'un actionnement électrique, sans compter sur la rotation moléculaire. Ils comprenaient les progrès récents de la science des matériaux pour construire des DE hautement efficaces et programmables par la forme ; appelés actionneurs diélectriques LCE (DLCEA). Les scientifiques ont aligné des molécules LCE dans des domaines locaux pour obtenir un actionnement électrique et permettre un morphing de forme à température ambiante pour démontrer de grandes, efforts rapides et puissants.
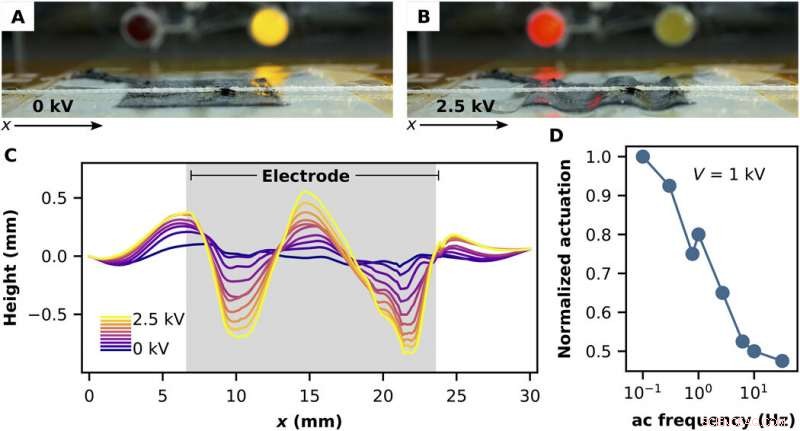
Flambement uniaxial hors plan DLCEA. (A) Off et (B) on états d'un dispositif DLCEA uniaxial avec condition aux limites fixe. L'expansion le long de la direction douce crée un flambement hors plan, qui déplace un fil fin tendu à travers la surface. (C) Mesure expérimentale du flambement en fonction de la tension appliquée. (D) Réponse en fréquence du flambement uniaxial DLCEA à 1 kV. L'amplitude d'actionnement de 0,1 Hz est d'environ 130 µm. Crédits photo :Zoey S. Davidson. Crédit :Avancées scientifiques, doi:10.1126/sciadv.aay0855
L'équipe de recherche a développé les films LCE en deux étapes; premier, ils ont brièvement développé un oligomère, suivi de la fabrication d'un film LCE à l'aide d'une réaction de clic thiol-acrylate. Ils ont réglé le rapport exact des composants, le choix du monomère et du linker dithiol, pour ajuster les propriétés mécaniques souhaitées du film LCE final. Le travail a produit de grandes zones de LCE uniaxiale bien ordonnée avec une grande anisotropie élastique. Les scientifiques ont appliqué des électrodes à graisse conformes sur les deux faces du film LCE pour créer les dispositifs DLCEA (actionneur diélectrique LCE).
Davidson et al. puis caractérisé (testé) les matériaux en commençant par des films LCE monodomaines alignés uniaxialement. Prochain, ils ont testé les DLCEA uniaxiales dans des configurations isométriques (déformation constante) et isotoniques (force constante). Par exemple, lors d'essais isométriques, ils ont appliqué des contraintes initiales aux dispositifs DLCEA et permis la relaxation avant d'appliquer une haute tension pour l'actionnement électrique. Lors des tests isopotentiels (où chaque point d'une région ou d'un espace est au même potentiel), les scientifiques ont tendu le DLCEA sous une tension constante pour indiquer l'actionnement attendu.
Démonstration du flambement uniaxial DLCEA. Un DLCEA aligné uniaxialement se déforme lorsqu'il est chargé par un potentiel de 2,5 kV, puis s'aplatit lorsque les électrodes sont déchargées. La corde tenue tendue sur le DLCEA permet de visualiser l'actionnement mais est également légèrement déplacée par le flambage. Crédit :Avancées scientifiques, doi:10.1126/sciadv.aay0855
En utilisant le même DLCEA, l'équipe de recherche a effectué des tests isotoniques en suspendant une variété de poids à l'extrémité libre de l'appareil pour générer des forces de charge constantes et des contraintes nominales initiales. Ils ont ensuite brusquement déchargé le dispositif DLCEA pondéré et capturé le mouvement ultérieur à l'aide d'une vidéo à haute vitesse. Au fur et à mesure que la charge et la déformation expérimentales augmentaient, la capacité du DLCEA a augmenté.
Lors de l'actionnement de formes complexes, les conditions aux limites ont joué un rôle important pour déterminer le changement de forme du DLCEA. L'équipe de recherche a compris le rôle des conditions aux limites en caractérisant l'effet de flambement causé par l'expansion de l'élastomère entre les limites fixes, ils ont observé une augmentation de l'amplitude de flambement avec l'augmentation de la tension. Le pic d'actionnement était également une autre caractéristique d'intérêt pour les applications DLCEA, les scientifiques ont mesuré le changement d'amplitude d'actionnement en fonction de la fréquence appliquée en utilisant un potentiel de 1 kV variant de manière sinusoïdale. Bien que l'amplitude d'actionnement ait diminué de façon exponentielle avec la fréquence, les chercheurs ont mesuré les paramètres (50 µm) à 30 Hz et 1 kV.
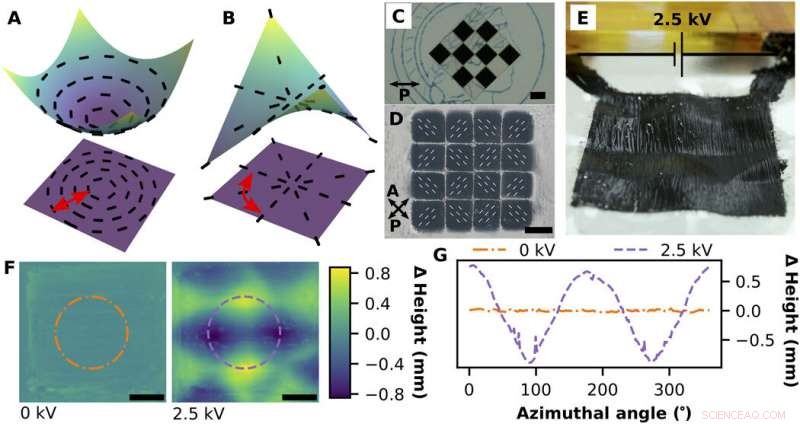
DLCEA pixélisé. Actionnement de forme programmé, comme une déformation de motif de fossette, est possible en modelant la configuration du directeur dans un réseau de défauts azimutal-radial. (A) Les types de défauts azimutaux se déforment en un cône avec une courbure gaussienne localement positive, et (B) les types de défauts radiaux se déforment en un anti-cône avec une courbure gaussienne localement négative (en forme de selle). En (A) et (B), les flèches rouges à double tête indiquent la direction douce. (C) Les défauts sont modelés à l'aide d'un réseau pixelisé de films polarisants avec les orientations locales conçues. (D) Vu à travers des polariseurs croisés, le film LCE fabriqué a un alignement uniaxial pixelisé, indiqué par des lignes blanches en pointillés, formant un réseau de défauts. (E) Lorsqu'il est chargé à 2,5 kV, il y a une grande déformation visible de la surface. (F) La carte de hauteur mesurée par profilométrie du LCE recouvert de graisse est presque plate sans charge et varie de plus de 1,6 mm lorsqu'elle est chargée à 2,5 kV. Les tirets-points et les cercles de tirets en (F) sont des traces de hauteur représentées en (G). Le changement d'une hauteur approximativement constante à une hauteur variant de manière sinusoïdale indique un changement de signe de la courbure de Gauss locale. Barres d'échelle, 4 millimètres. Crédits photo :Zoey S. Davidson. Crédit :Avancées scientifiques, doi:10.1126/sciadv.aay0855
Pour ensuite démontrer la capacité de pré-programmer des motifs complexes en 2D, suivi d'un actionnement électrique des films en formes 3-D, les scientifiques ont conçu des configurations de directeurs LCE variant dans l'espace. Ils ont observé que le film LCE se déformait hors du plan avec une courbure gaussienne localement positive ou négative pour former des cônes ou une déformation anti-cône dans les milieux élastiques. Davidson et al. observé le changement de hauteur programmé localement et la formation d'accompagnement de courbure de Gauss dans le dispositif expérimental. Les chercheurs attribuent le rendement élevé observé dans le système à l'anisotropie du module d'élasticité et du coefficient de Poisson. L'anisotropie du coefficient de Poisson du matériau est une caractéristique importante qui peut permettre l'actionnement d'un changement de forme programmé. Par mécanisme, le LCE actionné ou comprimé peut se dilater transversalement pour créer un changement de forme. La méthode expérimentale développée dans ce travail peut être généralisée pour créer une grande variété de changements de forme programmables. Par conséquent, lorsqu'un champ électrique est appliqué au DLCEA, l'appareil peut produire des mouvements tordus, où la grandeur dépendra des propriétés intrinsèques du matériau et de la géométrie LCE.
De cette façon, Zoey S. Davidson et ses collègues ont combiné les caractéristiques souhaitées des DE et des LCE au sein d'une seule plate-forme matérielle pour former des DLCEA actionnés électriquement avec des performances d'actionnement supérieures. Les appareils ont affiché une efficacité de conversion d'énergie élevée (20 %), une vitesse d'actionnement élevée (120 % par seconde) et un changement de forme programmable de 2D à 3D avec plus de 1, Course hors plan de 800 pour cent. Pour des forces d'actionnement plus importantes, l'équipe de recherche considère les empilements DLCEA multicouches.
Les informations fournies dans ce travail sur les techniques d'intégration de matériaux actifs et les mécanismes d'électro-actionnement peuvent offrir des opportunités plus intéressantes. Les méthodes peuvent être couplées à l'impression 3D, stratégies d'actionnement d'origami et de kirigami pour créer des robots souples multifonctionnels avec des matériaux à faible coût et durables en tant qu'inventions frugales. Le mécanisme développé peut également être appliqué à d'autres technologies telles que la récupération et le stockage d'énergie, pour les dispositifs médicaux, technologie portable et aérospatiale.
© 2019 Réseau Science X