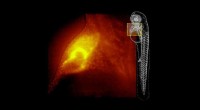
Artefact avec six sphères réfléchissantes à chaque extrémité utilisé dans la nouvelle méthode de test standard du NIST pour évaluer les performances des systèmes de suivi optique. Ces systèmes, similaire aux appareils de jeu à domicile qui suivent les mouvements d'un joueur, ont de nombreuses utilisations, y compris les simulateurs de vol, déplacer des robots dans les usines, et la chirurgie guidée par l'image. Crédit :Roger Bostelman/NIST
Lancer une frappe parfaite au bowling virtuel ne nécessite pas que votre système de jeu suive avec précision la position et l'orientation de votre bras oscillant. Mais si vous utilisez un chariot élévateur robotisé dans une usine, manipuler un bras mécanique sur une chaîne de montage ou guider un scalpel laser télécommandé à l'intérieur d'un patient, la capacité de localiser exactement où il se trouve dans l'espace tridimensionnel (3D) est essentielle.
Pour rendre cette mesure plus fiable, une équipe public-privé dirigée par le National Institute of Standards and Technology (NIST) a créé une nouvelle méthode de test standard pour évaluer dans quelle mesure un système de suivi optique peut définir la position et l'orientation d'un objet - connu sous le nom de " pose " - avec six degrés de liberté :haut/bas, droite gauche, en avant en arrière, terrain, lacet et roulis.
Les systèmes de suivi optique fonctionnent sur un principe similaire à la vision stéréoscopique d'un humain. Les deux yeux d'une personne travaillent ensemble pour percevoir simultanément leur environnement et dire au cerveau exactement où se trouvent toutes les personnes et tous les objets dans cet espace. Dans un système de poursuite optique, les « yeux » se composent de deux caméras ou plus qui enregistrent la pièce et sont associées à des émetteurs de faisceaux qui renvoient un signal - infrarouge, laser ou LIDAR (Light Detection and Ranging)—des objets dans la zone. Avec les deux sources de données alimentant un ordinateur, la pièce et son contenu peuvent être recréés virtuellement.
Déterminer la pose d'un objet est relativement facile s'il ne bouge pas, et les tests de performance précédents pour les systèmes de poursuite optique reposaient uniquement sur des mesures statiques. Cependant, pour des systèmes tels que ceux utilisés pour piloter les chariots élévateurs à fourche à guidage automatique (AGV) - les bêtes de somme robotisées que l'on trouve dans de nombreuses usines et entrepôts - ce n'est pas suffisant. Leur "vision" doit être de 20/20 pour les objets fixes et mobiles afin de garantir leur efficacité et leur sécurité.
Pour répondre à ce besoin, une norme internationale ASTM récemment approuvée (ASTM E3064-16) fournit désormais une méthode de test standard pour évaluer les performances des systèmes de suivi optique qui mesurent la pose dans six degrés de liberté pour la statique - et pour la première fois, dynamique—objets.
Les ingénieurs du NIST ont aidé à développer à la fois les outils et la procédure utilisés dans la nouvelle norme. "Les outils sont deux artefacts en forme de haltères que les systèmes de suivi optique doivent localiser pendant le test, " a déclaré Roger Bostelman, ingénieur en électronique du NIST. " Les deux artefacts ont une barre de 300 millimètres au centre, mais l'un a six marqueurs réfléchissants attachés à chaque extrémité tandis que l'autre a deux formes 3-D appelées cuboctaèdres [un solide avec 8 faces triangulaires et 6 faces carrées]. " Les systèmes de suivi optique peuvent mesurer les poses complètes des deux cibles.