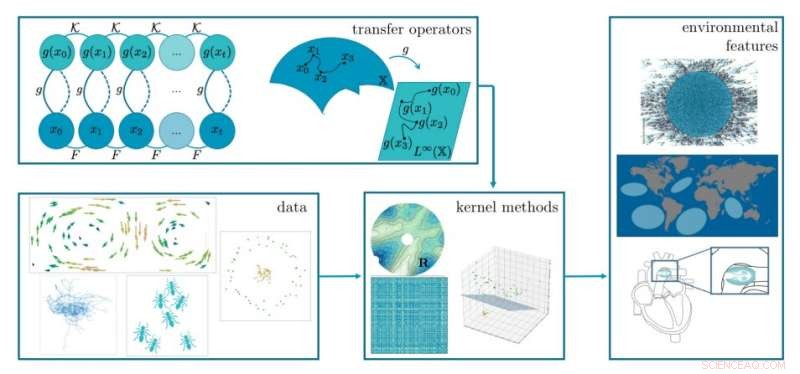
Schéma d'interaction entre les données, les opérateurs de transfert, les méthodes du noyau et les fonctionnalités environnementales. Les opérateurs de transfert représentent des systèmes dynamiques, où un état x ∈ X est relevé dans un espace L∞X et g(x) fournit les propriétés physiques du système. De nombreux systèmes sont définis par des données présentant des modèles complexes, tels que deux anneaux imbriqués, des flux dans les océans, des trajectoires de roulage et des comportements biologiques. Les méthodes du noyau transforment ces données en un espace alternatif à l'aide des fonctions du noyau. Les données sont alors plus faciles à interpréter, par exemple en séparant deux anneaux imbriqués ou en créant une matrice de Gram à utiliser dans un algorithme de noyau. Les opérateurs de transfert sont représentés par des méthodes de noyau en incorporant des systèmes dynamiques dans un espace de noyau, les algorithmes R. Kernel extraient les caractéristiques environnementales des opérateurs de transfert, telles que les endroits où les humains ont tendance à se rassembler dans les foules, les zones de gyres dans les océans ou les modèles de circulation sanguine dans les cœurs. . Crédit :Salam, Edwards et Hsieh.
Ces dernières années, les roboticiens ont créé une variété de systèmes qui pourraient éventuellement fonctionner dans des environnements réels. Comme la plupart des paramètres du monde réel, en particulier les espaces publics, sont dynamiques et imprévisibles, pour naviguer efficacement dans ces environnements, les robots doivent être capables de bien comprendre leur environnement.
Des chercheurs du laboratoire GRASP de l'Université de Pennsylvanie ont récemment mené une étude sur la façon dont les caractéristiques liées à un environnement donné peuvent améliorer la conscience d'un robot et sa capacité à naviguer dans son environnement. Leur article, prépublié sur arXiv, était basé sur deux de leurs efforts de recherche antérieurs.
La première de ces études précédentes a introduit une série de stratégies qui utilisaient des informations environnementales pour améliorer l'autonomie d'un robot dans la compétition d'une tâche spécifique, à savoir la localisation de la source d'un déversement chimique dans des écoulements turbulents. Dans le cadre de la deuxième étude, d'autre part, l'équipe a introduit de nouvelles politiques de contrôle au niveau de l'agent qui exploitent les caractéristiques environnementales ou le bruit pour maintenir une distribution spatiale souhaitée de l'agent robotique de détection dans un environnement de flux géophysique.
"Nos travaux précédents se sont concentrés sur les structures cohérentes lagrangiennes, une caractéristique importante des systèmes dynamiques dans de nombreuses applications telles que l'océanographie et la prévision météorologique, et comment elles peuvent être utilisées en robotique", a déclaré Tahiya Salam, l'un des chercheurs qui a mené l'étude. TechXplore. "Notre nouveau travail se concentre sur la façon dont une fonctionnalité similaire, des ensembles cohérents, peut être apprise en ligne et sur de nouvelles approches pour la façon dont ces fonctionnalités peuvent être utilisées dans des applications robotiques, telles que la surveillance des foules en milieu urbain et la navigation économe en énergie dans l'eau."
Dans leur nouvelle étude, Salam et les autres chercheurs du laboratoire GRASP ont utilisé une série de techniques qui combinent des approches de dynamique globale avec l'apprentissage automatique. Dans ce contexte, le terme « dynamique globale » fait référence à la dynamique globale d'un environnement donné et aux caractéristiques caractérisant cette dynamique.
"La technique que nous avons utilisée nous a permis d'apprendre des fonctionnalités globales à partir de données collectées à partir des environnements dans lesquels les robots opèrent", a expliqué Salam. "Les caractéristiques globales, appelées ensembles cohérents, ont des propriétés intéressantes ; à savoir, elles représentent des régions qui se dispersent très lentement. En utilisant ces informations sur les régions qui se dispersent très lentement, les robots peuvent exploiter ces caractéristiques pour prendre des décisions."
Salam et ses collègues ont calculé ces soi-disant «ensembles cohérents» en ligne à l'aide de techniques d'apprentissage automatique. Par la suite, ils ont conçu un cadre capable de contrôler les comportements d'un robot en fonction des caractéristiques environnementales qu'ils ont calculées.
"Nous avons trouvé un moyen de calculer des ensembles cohérents en temps réel sans disposer d'informations détaillées sur un modèle décrivant l'environnement", a expliqué Salam. "De plus, nous avons pu utiliser ces ensembles cohérents de manière intelligente pour obtenir des comportements de robot intelligents."
Salam et ses collègues ont évalué le cadre qu'ils ont développé dans une série d'expériences et ont constaté qu'il surpassait considérablement les méthodes hors ligne pour le calcul des caractéristiques environnementales. L'équipe a spécifiquement démontré l'efficacité du modèle qu'elle a développé dans deux scénarios où des robots surveillaient des environnements urbains et naviguaient sur l'eau.
À l'avenir, le cadre introduit par cette équipe de chercheurs pourrait finalement contribuer à améliorer la capacité des robots existants et émergents à naviguer dans des environnements inconnus et dynamiques. Pendant ce temps, Salam prévoit d'explorer plus avant le potentiel d'utilisation des fonctionnalités environnementales pour améliorer la navigation des robots.
"Dans mes prochaines études, je continuerai à étudier les techniques qui relient la dynamique globale et l'apprentissage automatique dans des cadres plus généraux", a ajouté Salam. "Par exemple, je voudrais représenter la dynamique globale d'environnements arbitraires à partir de mesures de capteurs collectées par des robots."