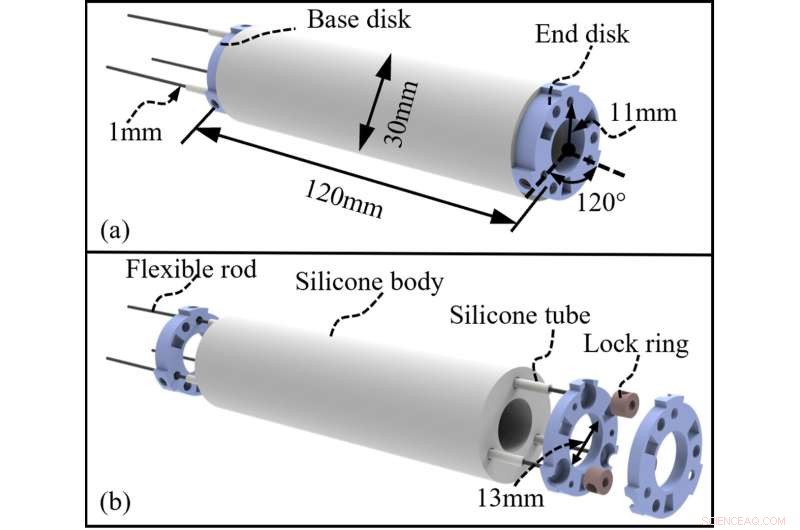
Structure du bras souple entraîné par tige. (a) Aperçu de la conception. (b) Vue éclatée. Crédit :Wang et al.
Les robots souples capables d'accomplir des tâches avec une efficacité, une exactitude et une précision élevées pourraient avoir de nombreuses applications intéressantes. Par exemple, ils pourraient être introduits dans des contextes médicaux, aidant les médecins à effectuer des interventions chirurgicales complexes ou aidant les patients âgés et vulnérables pendant la rééducation.
Les robots mous sont plus flexibles et peuvent se déformer davantage. Cela peut se traduire par une dextérité accrue (c. P>
Des chercheurs de l'Université nationale de Singapour et de l'Université Jiaotong de Pékin ont récemment développé un nouveau robot souple à tige (RDSR) qui fonctionne par des mouvements de poussée et de traction. Ce robot, présenté dans un article publié dans les IEEE Robotics and Automation Letters , combine les mécanismes de deux systèmes robotiques précédemment créés par les membres du groupe de recherche.
"Une performance bien équilibrée en termes de dextérité, de précision et de charge utile pourrait avoir un grand potentiel dans les applications de robots mous", a déclaré Cecilia Laschi, l'une des chercheuses qui a mené l'étude, à TechXplore. "De nombreuses études portent sur ce domaine et quelques travaux et réalisations antérieures nous ont inspirés. Par exemple, dans une recherche pionnière publiée dans Materials Science and Engineering, nous avons développé un robot mou inspiré de la pieuvre, mû par des tendons longitudinaux et transversaux, de même aux muscles de la pieuvre."
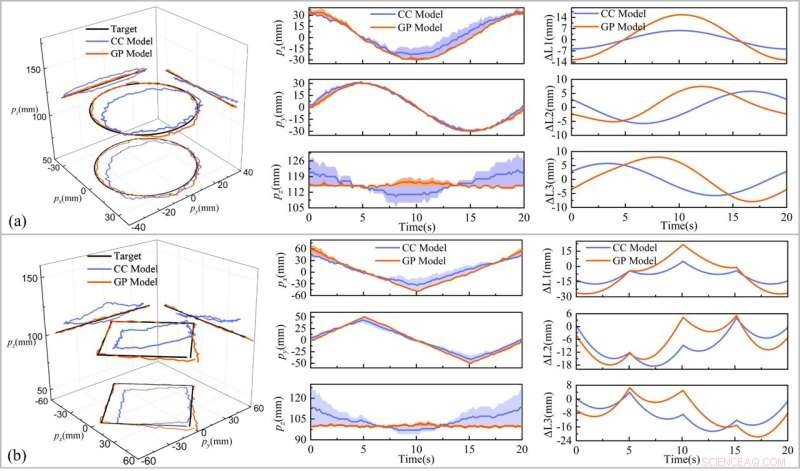
Performances de suivi de trajectoire de la commande en boucle ouverte basée sur les modèles CC et GP. (a) Cas d'une trajectoire circulaire. (b) Cas pour chemin carré. Crédit :Wang et al.
Le précédent robot créé par Laschi et ses collègues de l'Institut de biorobotique de la Scuola Superiore Sant'Anna en Italie peut imiter la façon dont une pieuvre se déplace en allongeant, raccourcissant et pliant ses tentacules. Leur système nouvellement développé pourrait être particulièrement prometteur pour accomplir des missions dans des espaces confinés, comme le nettoyage ou les explorations, accéder à des cavités profondes et intervenir à l'intérieur du corps humain.
"La deuxième étude qui a inspiré nos travaux récents était le développement par mon équipe de recherche d'un robot continuum basé sur des tiges flexibles push-pull", a expliqué Peiyi Wang, un autre chercheur impliqué dans l'étude. "En combinant le corps souple pur de notre système inspiré de la pieuvre et le bras à tige du robot de Wang, notre nouveau robot vise à atteindre une performance équilibrée en termes de précision de mouvement, d'espace de travail, de DOF, de rigidité et de force de sortie active."
Le nouveau robot créé par Laschi, Wang et leurs collègues se compose d'un corps souple en silicone, d'une base rigide, de disques d'extrémité et de trois tubes en silicone contenant chacun une tige flexible à base de Nitinol (NiTi). Le corps en silicone, qui est intégré entre la base et le disque d'extrémité, est très doux et flexible, il peut donc être facilement allongé, raccourci et plié.
"Chacune des tiges flexibles de notre système peut être contrôlée à la fois dans les directions de poussée et de traction, ce qui est différent des tendons avec seulement une action de traction", a déclaré Wang. "Le robot souple à tige (RDSR) peut alors réaliser plusieurs mouvements dans toutes les directions (plusieurs DOF), grâce au contrôle coordonné de trois tiges push-pull."
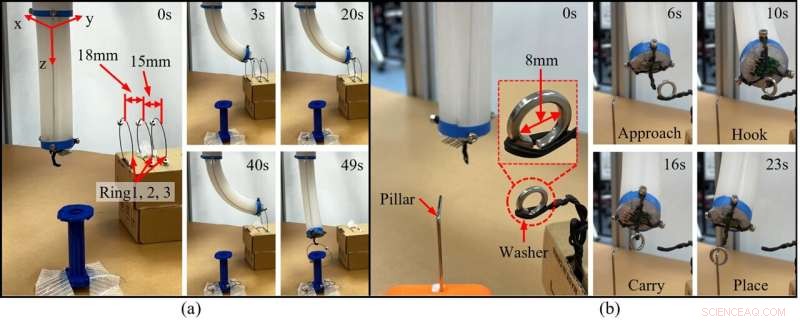
Manipulations d'objets effectuées par notre robot logiciel. Le RDSR a effectué des tâches de sélection et de placement avec un fonctionnement précis dans un grand espace de travail. (a) Les objets ont été placés près de la limite de l'espace de travail (tâche 1). (b) Un objet d'un petit diamètre de 8 mm a été placé (tâche 2). Crédit :Wang et al.
Les chercheurs ont évalué leur RDSR dans une série de tests, comparant ses performances à celles d'un robot souple à base de silicone (TDSR). Ils ont constaté que leur nouveau système robotique était plus rigide et pouvait fonctionner dans un espace de travail plus large (de 2,6 à 5,2 fois plus grand).
Contrairement au TDSR, ils l'ont également comparé, leur robot pouvait appliquer activement des forces de poussée perpendiculaires sur un plan incliné, et pouvait également accomplir des tâches impliquant la manipulation d'objets. Combinés, tous ces résultats suggèrent que le nouveau robot pourrait être plus efficace pour effectuer des tâches qui impliquent de ramasser et de placer des objets dans des espaces plus grands et avec des niveaux de précision élevés.
"Le mouvement obtenu avec un actionnement bidirectionnel push-pull est original", a déclaré Laschi. "Cela donne au robot souple un contrôle plus précis. Une implication notable de notre travail est son potentiel à permettre des performances équilibrées en termes de dextérité, de précision et de charge utile."
À l'avenir, le nouveau système RDSR créé par cette équipe de chercheurs pourrait aider à s'attaquer à des tâches complexes de manière plus efficace et fiable, en atteignant des niveaux de précision plus élevés. Dans leurs prochaines études, Laschi et ses collègues aimeraient tester l'efficacité des robots pour des applications biomédicales, y compris la chirurgie, la réadaptation et les soins aux personnes âgées.
"Nous prévoyons également d'améliorer le bras souple que nous avons créé sur d'autres aspects qui ne sont pas strictement liés à sa conception et à sa mécanique, mais au contrôle de ses mouvements", a ajouté Laschi. "L'ajout et la modélisation de la proprioception distribuée, c'est-à-dire la perception de la propre posture du bras, est un défi à relever, ainsi qu'un système de détection robuste pour détecter les forces de contact."
© 2022 Réseau Science X Configuration et manipulation de la robotique douce pour la maintenance en orbite