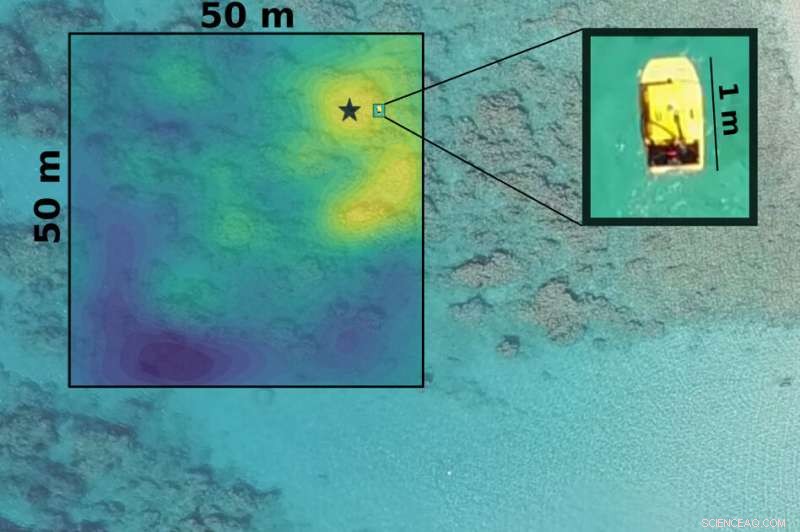
Même dans les eaux inexplorées, un système robotique développé par le MIT peut efficacement flairer de la valeur, endroits difficiles à trouver pour prélever des échantillons. Lorsqu'il est mis en œuvre dans des bateaux autonomes déployés au large des côtes de la Barbade (photo), le système a rapidement trouvé la tête de corail la plus exposée, ce qui signifie qu'elle était située à l'endroit le moins profond, ce qui est utile pour étudier l'impact de l'exposition au soleil sur les organismes coralliens. Crédit :Massachusetts Institute of Technology
Un système robotique autonome inventé par des chercheurs du MIT et de la Woods Hole Oceanographic Institution (WHOI) détecte efficacement les points d'échantillonnage les plus scientifiquement intéressants, mais difficiles à trouver, dans de vastes étendues de eaux inexplorées.
Les scientifiques de l'environnement sont souvent intéressés par la collecte d'échantillons aux endroits les plus intéressants, ou "maxima, " dans un environnement. Un exemple pourrait être une source de fuite de produits chimiques, où la concentration est la plus élevée et la plupart du temps intacte par des facteurs externes. Mais un maximum peut être n'importe quelle valeur quantifiable que les chercheurs veulent mesurer, comme la profondeur de l'eau ou les parties du récif de corail les plus exposées à l'air.
Les efforts pour déployer des robots à recherche maximale souffrent de problèmes d'efficacité et de précision. Communément, les robots vont et viennent comme des tondeuses à gazon pour couvrir une zone, ce qui prend du temps et recueille de nombreux échantillons inintéressants. Certains robots détectent et suivent des pistes à forte concentration jusqu'à leur source de fuite. Mais ils peuvent être induits en erreur. Par exemple, les produits chimiques peuvent être piégés et s'accumuler dans les crevasses loin d'une source. Les robots peuvent identifier ces points à forte concentration comme la source mais être loin d'être proches.
Dans un article présenté à la Conférence internationale sur les robots et systèmes intelligents (IROS), les chercheurs décrivent « PLUMES, " un système qui permet aux robots mobiles autonomes de se concentrer sur un maximum beaucoup plus rapidement et plus efficacement. PLUMES s'appuie sur des techniques probabilistes pour prédire quels chemins sont susceptibles de conduire au maximum, en franchissant les obstacles, courants changeants, et d'autres variables. Comme il collecte des échantillons, il pèse ce qu'il a appris pour déterminer s'il faut continuer sur une voie prometteuse ou rechercher l'inconnu, qui peut contenir des échantillons plus précieux.
Surtout, PLUMES atteint sa destination sans jamais être piégé dans ces endroits difficiles à haute concentration. "C'est important, parce qu'il est facile de penser que vous avez trouvé de l'or, mais vraiment tu as trouvé l'or des fous, " dit la co-première auteure Victoria Preston, un doctorat étudiant au Laboratoire d'informatique et d'intelligence artificielle (CSAIL) et au Programme conjoint MIT-WHOI.
Les chercheurs ont construit un bateau robotique propulsé par PLUMES qui a détecté avec succès la tête de corail la plus exposée dans le récif frangeant de Bellairs à la Barbade, c'est-à-dire il était situé à l'endroit le moins profond, ce qui est utile pour étudier l'impact de l'exposition au soleil sur les organismes coralliens. Dans 100 essais simulés dans divers environnements sous-marins, un robot virtuel PLUMES a également collecté systématiquement sept à huit fois plus d'échantillons de maxima que les méthodes de couverture traditionnelles dans les délais impartis.
"PLUMES fait le minimum d'exploration nécessaire pour trouver le maximum et se concentre ensuite rapidement sur la collecte d'échantillons précieux là-bas, " dit la co-première auteur Genevieve Flaspohler, un doctorat étudiant et au CSAIL et le programme conjoint MIT-WHOI.
Rejoindre Preston et Flaspohler sur le papier sont :Anna P.M. Michel et Yogesh Girdhar, les deux scientifiques du Département de physique océanique appliquée et d'ingénierie de l'OMSI; et Nicolas Roy, professeur au CSAIL et au Département d'aéronautique et d'astronautique.
Naviguer dans un compromis exploit-exploration
Une idée clé de PLUMES était l'utilisation de techniques allant de la probabilité à la raison pour naviguer dans le compromis notoirement complexe entre l'exploitation de ce qui a été appris sur l'environnement et l'exploration de zones inconnues qui peuvent être plus précieuses.
« Le défi majeur de la recherche du maximum est de permettre au robot d'équilibrer l'exploitation des informations provenant d'endroits qu'il sait déjà avoir de fortes concentrations et l'exploration d'endroits dont il ne connaît pas grand-chose, " dit Flaspohler. " Si le robot explore trop, il ne collectera pas suffisamment d'échantillons de valeur au maximum. S'il n'explore pas assez, il peut manquer complètement le maximum."
Plongé dans un nouvel environnement, un robot alimenté par PLUMES utilise un modèle statistique probabiliste appelé processus gaussien pour faire des prédictions sur les variables environnementales, telles que les concentrations chimiques, et estimer les incertitudes de détection. PLUMES génère alors une répartition des chemins possibles que le robot peut emprunter, et utilise les valeurs estimées et les incertitudes pour classer chaque chemin en fonction de la façon dont il permet au robot d'explorer et d'exploiter.
En premier, PLUMES choisira des chemins qui explorent aléatoirement l'environnement. Chaque échantillon, cependant, fournit de nouvelles informations sur les valeurs ciblées dans l'environnement environnant, telles que les endroits avec les concentrations les plus élevées de produits chimiques ou les profondeurs les plus faibles. Le modèle de processus gaussien exploite ces données pour réduire les chemins possibles que le robot peut suivre à partir de sa position donnée pour échantillonner à partir d'emplacements avec une valeur encore plus élevée. PLUMES utilise une nouvelle fonction objective, couramment utilisée dans l'apprentissage automatique pour maximiser une récompense, pour déterminer si le robot doit exploiter les connaissances passées ou explorer le nouveau domaine.
Des chemins « hallucinants »
La décision où prélever le prochain échantillon repose sur la capacité du système à « halluciner » toutes les actions futures possibles à partir de son emplacement actuel. Faire cela, il exploite une version modifiée de Monte Carlo Tree Search (MCTS), une technique de planification de parcours popularisée pour alimenter des systèmes d'intelligence artificielle maîtrisant des jeux complexes, comme le Go et les Échecs.
MCTS utilise un arbre de décision (une carte des nœuds et des lignes connectés) pour simuler un chemin, ou séquence de mouvements, nécessaires pour atteindre une action gagnante finale. Mais dans les jeux, l'espace pour les chemins possibles est fini. Dans des environnements inconnus, avec une dynamique changeante en temps réel, l'espace est effectivement infini, rendant la planification extrêmement difficile. Les chercheurs ont conçu des « MCTS d'observation continue, " qui s'appuie sur le processus gaussien et la nouvelle fonction objectif pour rechercher dans cet espace encombrant de chemins réels possibles.
La racine de cet arbre de décision SCTM commence par un nœud « croyance », qui est la prochaine étape immédiate que le robot peut prendre. Ce nœud contient l'historique complet des actions et des observations du robot jusqu'à ce point. Puis, le système étend l'arbre de la racine vers de nouvelles lignes et de nouveaux nœuds, examiner plusieurs étapes d'actions futures qui conduisent à des zones explorées et inexplorées.
Puis, le système simule ce qui se passerait s'il prélevait un échantillon de chacun de ces nœuds nouvellement générés, sur la base de certains modèles qu'il a appris à partir d'observations précédentes. En fonction de la valeur du nœud simulé final, le chemin entier reçoit un score de récompense, avec des valeurs plus élevées équivalant à des actions plus prometteuses. Les scores de récompense de tous les chemins sont ramenés au nœud racine. Le robot sélectionne le chemin avec le score le plus élevé, fait un pas, et recueille un échantillon réel. Puis, il utilise les données réelles pour mettre à jour son modèle de processus gaussien et répète le processus "d'hallucination".
"Tant que le système continue d'halluciner, il peut y avoir une valeur plus élevée dans des parties invisibles du monde, il doit continuer à explorer, " dit Flaspohler. " Quand il converge finalement sur un point qu'il estime être le maximum, car il ne peut pas halluciner une valeur plus élevée le long du chemin, il arrête alors d'explorer."
Maintenant, les chercheurs collaborent avec des scientifiques de l'OMSI pour utiliser des robots propulsés par PLUMES pour localiser les panaches chimiques sur les sites volcaniques et étudier les rejets de méthane dans la fonte des estuaires côtiers de l'Arctique. Les scientifiques s'intéressent à la source des gaz chimiques rejetés dans l'atmosphère, mais ces sites d'essai peuvent s'étendre sur des centaines de kilomètres carrés.
"Ils peuvent [utiliser PLUMES pour] passer moins de temps à explorer cette immense zone et vraiment se concentrer sur la collecte d'échantillons scientifiquement précieux, " dit Preston.
Cette histoire est republiée avec l'aimable autorisation de MIT News (web.mit.edu/newsoffice/), un site populaire qui couvre l'actualité de la recherche du MIT, innovation et enseignement.