Une équipe de recherche internationale a développé un capteur électronique, qui peut traiter aussi bien les signaux tactiles que tactiles. Cette « peau électronique » pourrait offrir une meilleure interface entre les humains et les machines. Crédit :HZDR/D. Makarov
Grâce à l'utilisation astucieuse des champs magnétiques, Des scientifiques du Helmholtz-Zentrum Dresden-Rossendorf (HZDR) et de l'Université Johannes Kepler de Linz ont développé le premier capteur électronique capable de traiter simultanément des stimuli tactiles et tactiles. Les tentatives antérieures n'ont jusqu'à présent pas réussi à combiner ces fonctions sur un seul appareil en raison du chevauchement des signaux des divers stimuli. Comme le capteur est facilement appliqué sur la peau humaine, il pourrait fournir une plate-forme interactive transparente pour les scénarios de réalité virtuelle et augmentée. Les chercheurs ont publié leurs résultats dans la revue scientifique Communication Nature .
Le plus grand organe humain, la peau, est probablement la partie du corps la plus polyvalente sur le plan fonctionnel. Il est non seulement capable de différencier les stimuli les plus variés en quelques secondes, mais il peut aussi classer l'intensité des signaux sur une large plage. Une équipe de recherche dirigée par le Dr Denys Makarov de l'Institut de recherche sur la physique et les matériaux des faisceaux ioniques du HZDR ainsi que le Soft Electronics Laboratory dirigé par le professeur Martin Kaltenbrunner de l'Université de Linz ont réussi à produire un équivalent électronique avec des caractéristiques similaires. Selon les scientifiques, leur nouveau capteur pourrait simplifier massivement l'interaction entre les humains et les machines, comme l'explique Denys Makarov :« Les applications en réalité virtuelle deviennent de plus en plus complexes. Nous avons donc besoin de dispositifs capables de traiter et de discriminer de multiples modes d'interaction.
Les systèmes actuels, cependant, travailler soit en enregistrant uniquement le toucher physique, soit en suivant les objets sans toucher. Les deux voies d'interaction sont désormais combinées pour la première fois sur le capteur, qui a été appelé un « système microélectromécanique magnétique » (m-MEMS) par les scientifiques. "Notre capteur traite les signaux électriques du sans contact et les interactions tactiles dans différentes régions, " dit le premier auteur de la publication, le Dr Jin Ge de HZDR, ajouter, " et ainsi, il peut différencier l'origine des stimuli en temps réel et supprimer les influences perturbatrices d'autres sources. » La base de ce travail est la conception inhabituelle que les scientifiques ont élaborée.
Flexibilité sur toutes les surfaces
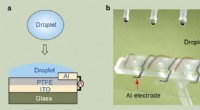
Sur un film polymère mince, ils ont d'abord fabriqué un capteur magnétique, qui repose sur ce que l'on appelle la résistance magnéto géante (GMR). Ce film était à son tour scellé par une couche de polymère à base de silicium (polydiméthylsiloxane) contenant une cavité ronde conçue pour être précisément alignée avec le capteur. Dans ce vide, les chercheurs ont intégré un aimant permanent flexible avec des pointes pyramidales dépassant de sa surface. "Le résultat rappelle un peu plus un film étirable avec des ornements optiques, " commente Makarov. " Mais c'est précisément l'un des points forts de notre capteur. " C'est ainsi qu'il reste si exceptionnellement flexible :il s'adapte parfaitement à tous les environnements. Même dans des conditions courbes, il fonctionne sans perdre sa fonctionnalité. Le capteur peut ainsi être placé très facilement, par exemple, au bout du doigt.
C'est précisément de cette manière que les scientifiques ont testé leur développement. Jin Ge précise :« Sur la feuille d'une marguerite, nous avons attaché un aimant permanent, dont le champ magnétique pointe dans la direction opposée de l'aimant attaché à notre plate-forme." Alors que le doigt s'approche maintenant de ce champ magnétique externe, la résistance électrique du capteur GMR change :elle chute. Cela se produit jusqu'au moment où le doigt touche réellement la feuille. À ce moment là, il monte brusquement parce que l'aimant permanent intégré est pressé plus près du capteur GMR et superpose ainsi le champ magnétique externe. "C'est ainsi que notre plate-forme m-MEMS peut enregistrer un changement clair de l'interaction sans contact à l'interaction tactile en quelques secondes, " dit Jin Ge.
Cliquez au lieu de cliquer, Cliquez sur, Cliquez sur
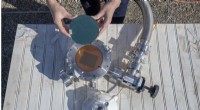
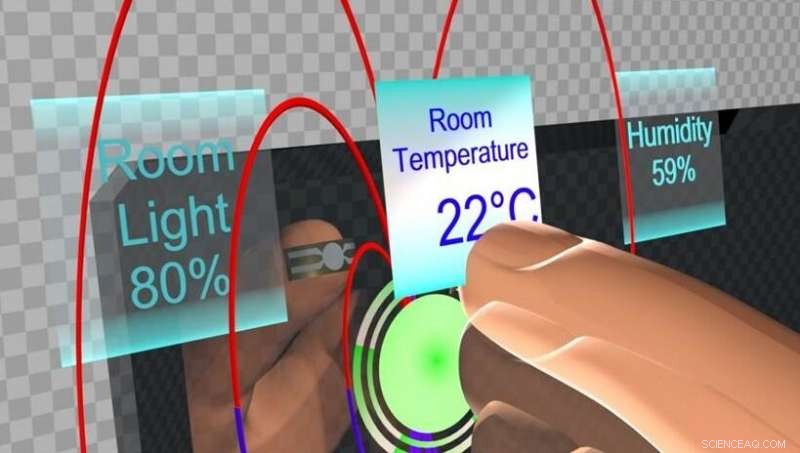
Cela permet au capteur de contrôler sélectivement les objets physiques et virtuels, comme le démontre l'une des expériences menées par l'équipe :sur une plaque de verre dont ils ont fourni un aimant permanent, les physiciens ont projeté des boutons virtuels qui manipulent des conditions réelles, comme la température ambiante ou la luminosité. A l'aide d'un doigt sur lequel la « peau électronique » avait été appliquée, les scientifiques pouvaient d'abord sélectionner la fonction virtuelle souhaitée sans contact grâce à l'interaction avec l'aimant permanent. Dès que le doigt a touché l'assiette, la plate-forme m-MEMS passe automatiquement en mode d'interaction tactile. Une pression légère ou forte pourrait alors être utilisée, par exemple, pour abaisser ou augmenter la température ambiante en conséquence.
Les chercheurs ont réduit une activité qui nécessitait auparavant plusieurs interactions à une seule. "Cela peut sembler un petit pas au début, " dit Martin Kaltenbrunner. " A long terme, cependant, une meilleure interface entre les humains et les machines peut être construite sur cette base." Cette " peau électronique " - en plus des espaces de réalité virtuelle - pourrait également être utilisée, par exemple, dans des environnements stériles. Les chirurgiens pourraient utiliser les capteurs pour manipuler l'équipement médical sans le toucher pendant une procédure, ce qui réduirait le risque de contamination.