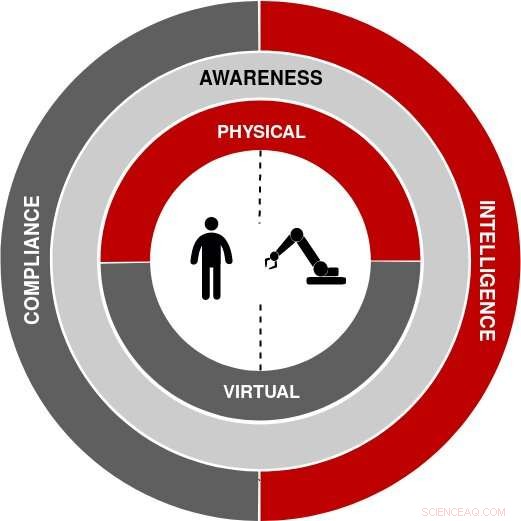
Un schéma de système pour le cadre conceptuel d'une collaboration homme-robot en tant que système de systèmes qui met en évidence les 3 aspects d'un système HRC :Conscience, Renseignement et conformité. Crédit :Savur, Kumar &Sahin.
Des chercheurs du Century Mold Collaborative Robotics Laboratory (CMCRL) du Rochester Institute of Technology (RIT) à New York ont récemment développé un nouveau cadre pour surveiller les réponses physiologiques humaines pendant que les utilisateurs collaborent avec un robot pour accomplir une tâche. Sous la direction du Pr Ferat Sahin, directeur du Laboratoire de Bio-Robotique Multi Agents, Les chercheurs du CMCRL travaillent au développement de systèmes, frameworks et outils logiciels pour étudier la collaboration homme-robot en milieu industriel. Leur nouvelle approche, décrit dans un article pré-publié sur arXiv et devant être présenté à l'IEEE Systems, Conférence Man &Cybernetics à Bari (Italie), permet de collecter en continu des données physiologiques lors des interactions homme-robot, tout en modifiant les mouvements d'un robot pour déclencher une réponse chez l'humain avec lequel il interagit.
De nombreux experts pensent que bientôt, les humains et les machines travailleront ensemble dans une variété de domaines, y compris l'industrie et la fabrication. Pour permettre une automatisation efficace et une collaboration homme-robot, cependant, les chercheurs devront développer des approches qui tirent parti des compétences humaines telles que la prise de décision, dextérité, flexibilité et créativité, en les combinant avec la vitesse, la précision et la puissance associées aux robots.
En réalité, alors qu'une automatisation complète coûterait très cher, la fabrication effectuée manuellement par l'homme seul est souvent lente et sujette aux erreurs. Il est donc important de développer des outils qui améliorent la collaboration homme-robot. Selon RIA, ce sera un élément central de la cinquième révolution industrielle, également connu sous le nom d'Industrie 5.0.
« À notre avis, il y a trois défis principaux à la collaboration homme-robot dans l'industrie. Ils sont la sécurité, la confiance humaine dans l'automatisation et la productivité, " Shitij Kumar, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore. « Tout cela est dépendant les uns des autres. Afin de relever ces défis, nous avons d'abord développé une configuration de collaboration homme-robot (HRC) en tant que système de systèmes qui nous permettrait de créer différents scénarios de collaboration homme-robot et de comprendre et d'analyser les interactions homme-robot."
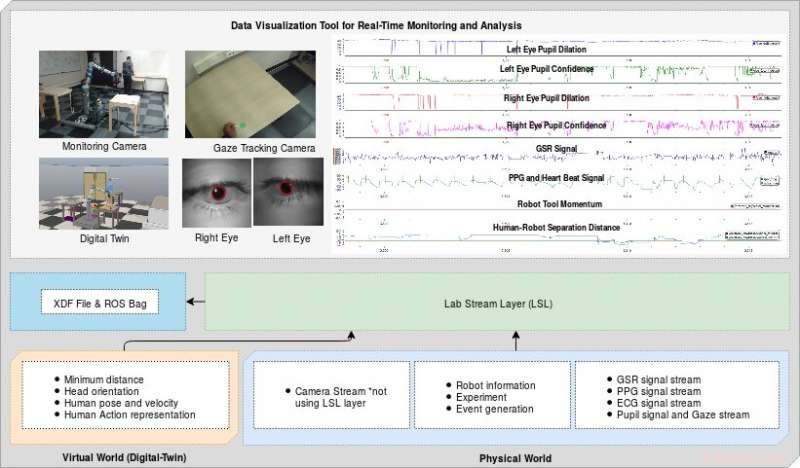
Un schéma du système de la mise en œuvre basé sur le cadre proposé représentant la collecte de données et le suivi au cours d'une expérience HRC. Crédit :Savur, Kumar &Sahin.
Dans le cadre de son doctorat, sous la direction du Dr Ferat Sahin, le directeur du CMCRL, Kumar a commencé à développer un système qui modifie le comportement du robot en fonction de la distance de séparation homme-robot et des actions dans l'espace de travail partagé. Dans ce contexte, le comportement d'un robot est déterministe et prévisible en fonction de règles.
Malgré la promesse affichée par sa démarche, il a constaté que la rétroaction humaine ne se produisait pas toujours, ce qui a rendu plus difficile pour son système d'atteindre une conformité de robot satisfaisante. La conformité du robot signifie essentiellement que le robot peut gérer les attentes des humains avec lesquels il interagit et communiquer efficacement avec eux.
"Nous pensions qu'une meilleure conformité du système qui donne à l'opérateur travaillant avec le robot un sentiment de contrôle et de prévisibilité du comportement du robot augmenterait sa "confiance dans l'automatisation", " et ainsi augmenter la productivité de la tâche, " Kumar a dit. " Cependant, nous avons alors commencé à nous demander, comment quantifier la « confiance » ou le niveau de confort d'un opérateur humain travaillant avec le robot ?"
Kumar et ses collègues pensent que la surveillance des signaux physiologiques humains, qui sont des indicateurs de stress mental et physique, ainsi que d'autres émotions, lors d'une tâche impliquant une interaction homme-robot serait un pas dans la bonne direction. Cette croyance est étayée par des recherches antérieures qui ont révélé que de tels signaux (appelés réponses psychophysiologiques) sont des indicateurs fiables pour modifier le comportement et le mouvement des robots.

Capteurs et dispositifs utilisés dans la mise en œuvre du prototype. Les chercheurs ont utilisé un système de capture de mouvement pour surveiller le mouvement humain et une caméra pour enregistrer l'expérience. Ils ont également suivi le regard humain à l'aide de Pupil Labs et de réponses physiologiques humaines telles que la dilatation de la pupille, PPG, RSG, EEG \&ECG enregistré. Crédit :Savur, Kumar &Sahin.
Avec ça en tête, Celal Savur, un doctorat Étudiant au CMCRL du RIT, a mené une étude pour explorer les effets du mouvement et du comportement du robot sur les réponses psychophysiologiques humaines. L'objectif principal de son étude était de comprendre quels changements dans le mouvement d'un robot entraînent des réactions d'"inconfort humain" telles que la peur ou le stress.
« Pour ce faire, un cadre pour un système qui représente et enregistre simultanément le mouvement du robot et l'état physiologique humain était nécessaire, " expliqua Savur. " Une fois la relation entre le mouvement du robot et l'état physiologique humain identifiée, la réponse physiologique humaine peut être utilisée comme retour pour contrôler/mettre à jour directement le mouvement/le comportement du robot. De tels systèmes sont appelés "systèmes informatiques physiologiques". dans lequel les jeux s'adaptent en temps réel aux réponses du joueur, pour obtenir une expérience de jeu plus interactive."
Dans leur étude, Savur et Kumar ont entrepris de développer un cadre capable de surveiller les réponses psychophysiologiques humaines lorsque les utilisateurs effectuent des tâches impliquant une collaboration homme-robot. Leur travail se situe à l'intersection entre l'informatique, robotique et psychophysiologie, une branche des neurosciences qui cherche à comprendre comment l'état mental d'une personne et ses réponses physiologiques interagissent ou s'influencent mutuellement.
Le cadre qu'ils ont développé entre dans la catégorie « informatique physiologique ». Il s'agit d'un type d'informatique affective qui intègre une adaptation logicielle en temps réel à l'activité psychophysiologique de l'utilisateur. le cadre qu'ils ont proposé peut être utilisé pour étudier comment les changements dans le mouvement du robot (par exemple, la vitesse et la trajectoire) affectent l'opérateur humain dans un environnement industriel.
« Considérons, par exemple, qu'il y a deux opérateurs travaillant avec un robot, opérateur A et B, " Kumar a expliqué. " L'opérateur A a travaillé plus longtemps et est à l'aise avec le robot, car il peut prédire le comportement du robot par expérience. L'opérateur B est nouveau et est un peu sceptique quant au mouvement du robot. Le comportement du robot change en termes de vitesse à laquelle il se déplace et de distance qu'il maintient lorsqu'il est à proximité de l'opérateur en fonction de l'état physiologique et des schémas comportementaux de l'opérateur. Dans ce scénario, pour une meilleure interaction homme-robot, le robot peut se déplacer à des vitesses plus élevées en travaillant à proximité de l'opérateur A, et déplacez-vous lentement en travaillant avec l'opérateur B. Au fur et à mesure que l'opérateur B acquiert plus d'expérience, le mouvement du robot peut s'y adapter, instaurant ainsi la confiance et affectant positivement la productivité globale."
L'étude menée par les chercheurs du CMCRL avait deux objectifs principaux. La première consistait à générer une base de données de tâches de collaboration homme-robot, enregistrer les interactions homme-robot. Ils ont ensuite voulu utiliser cette base de données pour étudier comment les réponses physiologiques humaines peuvent être utilisées pour affecter le mouvement d'un robot, impactant positivement le processus d'automatisation. En d'autres termes, leur objectif était de construire un système informatique physiologique pour la collaboration homme-robot dans les environnements industriels et de fabrication.
"Notre cadre est essentiellement un système qui représente et enregistre simultanément le mouvement du robot et l'état physiologique humain, " Kumar a dit. " Afin d'enregistrer cette information, le framework fournit des interfaces au robot, des capteurs tels que des caméras, système de capture de mouvement ainsi qu'aux dispositifs d'acquisition de données biologiques/biométriques. Comme tous ces appareils fonctionnent à des fréquences d'échantillonnage différentes, ce cadre aide à l'acquisition de données synchrone et à la représentation de la collaboration homme-robot."
Dans les configurations expérimentales traditionnelles de robotique sociale, on pose à des sujets humains des questions sur leurs expériences et leurs perceptions pendant ou après une expérience. En utilisant leurs commentaires, les chercheurs sont alors en mesure d'analyser et de quantifier les données subjectives recueillies au cours de l'expérimentation.
« Méthodes qui interrompent les sujets ou font se remémorer leur expérience par le sujet, cependant, ne sont pas toujours en mesure de maintenir l'intégrité de l'expérience ou de représenter avec précision les données subjectives, " expliqua Kumar. " Par conséquent, contrairement aux méthodes traditionnelles, cette mise en œuvre du cadre permet au sujet humain ou à l'investigateur principal de générer des marqueurs d'événements au fur et à mesure que l'expérience/tâche de collaboration homme-robot (HRC) est en cours d'exécution. »
Leur framework peut générer automatiquement des marqueurs d'événements basés sur la représentation homme-robot dans un monde virtuel, qui est connu comme un jumeau numérique. Par exemple, cela peut aider à identifier quand le robot et l'humain étaient les plus proches l'un de l'autre pendant la tâche, lorsque le robot a dû s'arrêter ou a été interrompu par une action humaine, l'avancement de la tâche effectuée par l'humain, événements basés sur des commandes ou un contrôle par l'opérateur humain, un événement où le robot travaillait à vitesse maximale, et le début/la fin d'une tâche.
"Notre framework fournit également une interface utilisateur permettant aux chercheurs de rejouer et de visualiser leurs expériences HRC, " dit Kumar. " De plus, il leur permet d'analyser et de labelliser les données collectées. La collecte continue et synchrone de données physiologiques à partir de divers appareils et leur interfaçage avec le contrôle et l'interface du robot dans un écosystème unique, permet une représentation complète de l'état de l'homme et du robot. Cela peut aider à comprendre la cause et l'effet entre l'état physiologique humain et les mouvements du robot."
Avec l'avènement des appareils portables et de l'Internet des objets (IoT), les données physiologiques humaines deviendront plus faciles à collecter et donc facilement disponibles. Le cadre développé par la recherche pourrait ainsi s'avérer extrêmement précieux, car il est conçu pour tirer parti de ces données pour améliorer les interactions homme-robot.
"Ce cadre permet un enregistrement de données continu avec génération d'événements intégrée et synchronisation de signaux sur des systèmes distribués peut maintenir l'intégrité de l'expérience (recréer le scénario d'une tâche dans un environnement industriel) et représenter avec précision les données subjectives, ", a déclaré Kumar.
Kumar et ses collègues pensent qu'un agent capable d'un tel calcul physiologique (c'est-à-dire, qui peut détecter les réponses physiologiques humaines et y répondre) pourrait aboutir à un système fermé de l'homme dans la boucle, où les utilisateurs humains et les robots dans une configuration HRC sont surveillés et les informations sont partagées entre eux. Cela pourrait entraîner une meilleure communication, ce qui pourrait finalement favoriser une plus grande confiance dans l'automatisation parmi le public, tout en augmentant la productivité. À l'avenir, les chercheurs prévoient de mettre les bases de données générées dans leur étude à la disposition d'autres chercheurs du HRI.
"Nos prochaines études se concentreront sur le développement d'une application d'interface utilisateur complète du système informatique physiologique pour le traitement des signaux d'enregistrement, extraire des informations et appliquer un algorithme d'apprentissage automatique pour fournir une rétroaction au robot, " Kumar a déclaré. " L'objectif final de ce travail est de générer une base de données qui peut être utilisée pour mieux comprendre comment les réponses physiologiques humaines peuvent être déduites pour entraîner un comportement de mouvement de robot adaptatif. "
© 2019 Réseau Science X