Crédit :Sun et al.
Pour naviguer dans des environnements dynamiques, les véhicules autonomes (AV) devraient être capables de traiter toutes les informations dont ils disposent et de les utiliser pour générer des stratégies de conduite efficaces. Des chercheurs de l'Université de Californie, Berkeley, ont récemment proposé un schéma de perception sociale pour planifier le comportement des voitures autonomes, ce qui pourrait aider à développer des VA mieux équipés pour faire face à l'incertitude dans leur environnement environnant.
"Mes recherches se sont concentrées sur la façon de concevoir des comportements de conduite de type humain pour les voitures autonomes, " Soleil éclairant, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore. "Notre objectif est de construire des AV qui ne comprennent pas seulement le comportement humain, mais aussi effectuer de manière similaire dans de multiples aspects, y compris la perception, raisonnement et action."
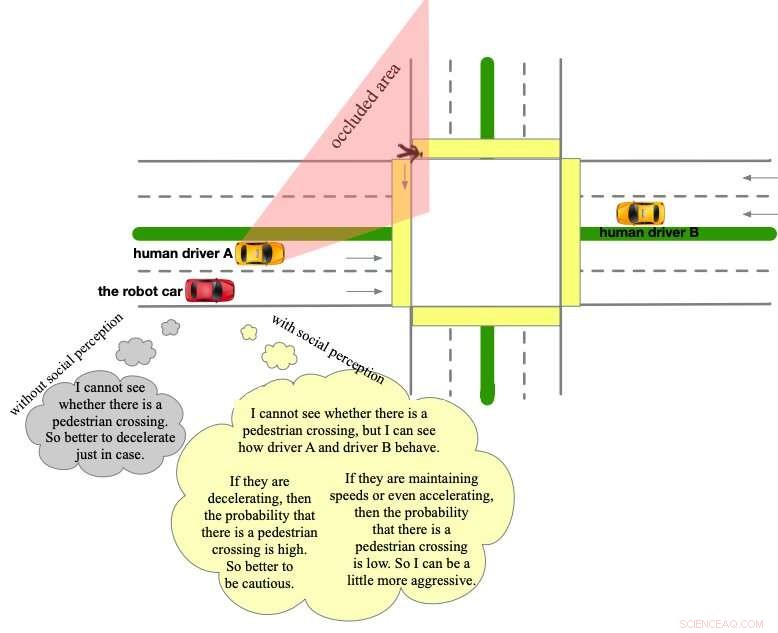
Sun et ses collègues ont observé que les conducteurs humains ont tendance à considérer les autres véhicules comme des obstacles dynamiques, inférant souvent des informations supplémentaires à partir de leur comportement sur la route. Ces informations sont généralement des informations sur l'environnement occlus ou des informations sociales physiquement indétectables.
"Il serait très important et bénéfique pour les AV de se comporter de la même manière, car cela les rendrait plus intelligents, plus humaine et finalement plus sûre, " dit Sun. " Dans ce travail, nous laissons les AV traiter tous les autres participants sur la route comme des capteurs dynamiques et distribués."
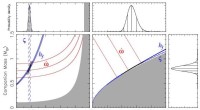
Le schéma de perception sociale proposé par Sun et ses collègues traite essentiellement tous les véhicules et obstacles sur la route comme des capteurs répartis dans un réseau de capteurs. Cela permet aux AV d'observer à la fois les comportements individuels et les comportements de groupe, en utilisant leurs observations pour mettre à jour uniformément différents types d'incertitudes au sein d'un « espace de croyance ». Le programme se concentre particulièrement sur les incertitudes de l'état physique (par exemple causées par des occlusions ou une portée limitée du capteur) et les incertitudes du comportement social (par exemple, les préférences de conduite locales).
Le schéma intègre ensuite des croyances de perception sociale mises à jour avec un cadre de planification probabiliste basé sur le contrôle prédictif de modèle (MPC), dont la fonction de coût est apprise via l'apprentissage inverse par renforcement (IRL). Cette combinaison entre un module de planification probabiliste et une perception socialement renforcée permet aux véhicules de générer des comportements défensifs socialement compatibles et donc pas trop stricts.
"En observant les comportements des autres et en les comparant à des modèles de comportement antérieurs, AVs peut raisonner sur les états possibles des variables indétectables en utilisant uniquement ses propres capteurs, " Sun a déclaré. "Cela peut aider les AV à réduire les incertitudes de perception, tout comme le font les humains. Par rapport à d'autres approches existantes, l'idée de ce travail étend efficacement la capacité de perception des AV sans aucun matériel supplémentaire, et peut aider à générer des manœuvres plus sûres et plus efficaces."
Sun et ses collègues ont évalué leur cadre dans une série de simulations présentant des scénarios représentatifs avec des occlusions de capteurs. Ils ont découvert qu'en imitant les mécanismes de perception sociale des humains, le module de perception a détecté moins d'incertitudes, générer finalement des comportements AV plus sûrs et plus efficaces via un planificateur de défense non conservateur.
"Pratiquement, cette fonctionnalité intéressante peut rendre les AV plus efficaces en présence d'occlusions, ainsi que plus adaptable dans de nouveaux environnements de conduite, parce qu'ils peuvent rapidement déduire et découvrir les informations sociales physiquement indétectables dans leur environnement, " expliqua Sun.
À l'avenir, le schéma de perception sociale conçu par cette équipe de chercheurs pourrait éclairer le développement de voitures autonomes capables de naviguer plus efficacement dans des environnements en constante évolution. Sun et ses collègues prévoient maintenant de développer davantage leur cadre, en changeant certaines de ses hypothèses et en la rendant plus facile à appliquer dans des situations réelles.
"Pour déduire des informations incertaines supplémentaires à partir des comportements d'autres participants à la route, Les AV doivent être équipés de modèles de comportement antérieurs qui peuvent se rapprocher des comportements réels des autres, " expliqua Sun. " Dans le travail actuel, nous supposons que tous les autres participants à la route sont des optimiseurs rationnels et approchent leurs modèles de génération de comportement via des fonctions de récompense. Dans nos futurs travaux, nous allons assouplir l'hypothèse de rationalité pour rendre l'approximation plus pratique."
© 2019 Réseau Science X