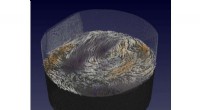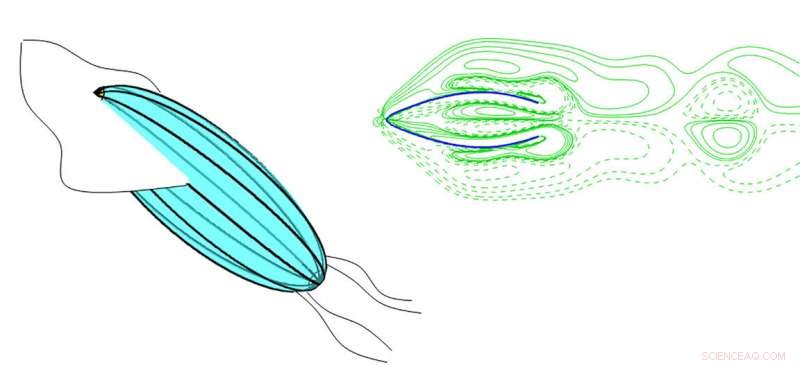
Xiaobo Bi et Qiang Zhu discutent de leur travail de développement d'un robot aquatique inspiré des céphalopodes. (À gauche) Un robot inspiré du calmar qui combine le battement des nageoires et le jet pour la locomotion. (À droite) Les simulations numériques donnent un aperçu des mécanismes physiques sous-jacents. Crédit :Qiang Zhu
Inspiré par la stratégie de nage unique et efficace des céphalopodes, les scientifiques ont développé un robot aquatique qui imite leur forme de propulsion.
Ces hautes vitesses, les robots en forme de calmar sont faits de matériaux intelligents, qui les rendent difficiles à détecter - un avantage qui a un potentiel de reconnaissance militaire et d'applications scientifiques - tout en maintenant une faible empreinte environnementale.
Les physiciens Xiaobo Bi et Qiang Zhu ont utilisé des simulations numériques pour illustrer les mécanismes physiques et la mécanique des fluides de la méthode de nage d'un calmar, qui utilise des rafales intermittentes par propulsion à réaction pulsée. En utilisant cette forme de locomotion, le nouvel appareil peut atteindre des vitesses impressionnantes, tout comme son inspiration animale. Bi et Zhu discutent de leur travail dans le Physique des fluides .
En nageant, ces machines semblables à des calamars aspirent l'eau dans une chambre sous pression, puis l'éjectent. L'appareil à corps mou pourrait être utilisé comme plate-forme pour la surveillance de l'environnement en utilisant simultanément cette fonction pour tester des échantillons d'eau pendant qu'il nage.
"En plus des simulations numériques 2D et 3D présentées dans cet article, nous travaillons avec une équipe interdisciplinaire pour construire un prototype du dispositif mécanique, pour effectuer à la fois la nage en ligne droite et les manœuvres, " a déclaré Zhu. " Ce projet combinera la dynamique des fluides, contrôler, matériaux intelligents et conception robotique."
L'appareil peut être utilisé soit comme nageur autonome, soit comme hélice d'un véhicule sous-marin.
Les chercheurs n'ont pas encore réussi à maintenir des vitesses pouvant durer plus de quelques cycles en raison des turbulences et des instabilités, mais ils travaillent sur des moyens de surmonter cela. Zhu espère que cette recherche fournira un point de départ pour une modélisation plus sophistiquée et des études expérimentales pour développer des robots comme leur création.