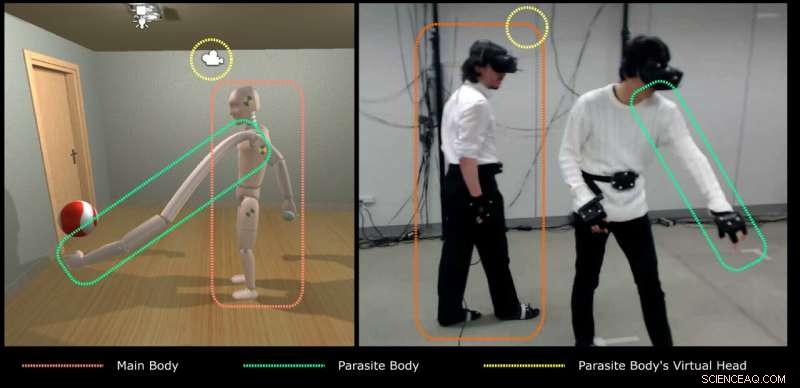
Le corps parasite dans deux contextes. À gauche, le point de vue de la réalité virtuelle. Sur la droite, l'espace réel avec les deux participants. Le participant à gauche (indiqué en rouge) contrôle le corps principal. Le participant de droite (indiqué en vert) contrôle le membre parasite. Le cercle jaune indique la position de la caméra dans les deux contextes. Crédit :Takizawa et al.
Les récents progrès de la robotique ont permis le développement de systèmes pour aider les humains dans une variété de tâches. Un type de système robotique qui a gagné en popularité au cours des dernières années est le bras robotique portable actionné à distance par un tiers.
Tout en assistant les utilisateurs, ces bras doivent collecter un retour visuel et le partager avec l'opérateur tiers. Ce retour d'expérience peut être collecté de plusieurs manières, la plus courante consiste à placer une caméra sur l'utilisateur « hébergeant » le bras robotique, également appelé opérateur principal (MBO). Cette approche particulière de la collecte de données visuelles, cependant, peut être quelque peu limitatif, car il dépend fortement des mouvements de l'utilisateur qui porte le système.
Avec cette limitation à l'esprit, chercheurs de l'Université Keio, RIKEN AIP et l'Université de Tokyo ont récemment développé un système de réalité virtuelle (VR) pour étudier le concept de « modification du corps, " qui implique l'utilisation de membres robotiques portables pour aider les humains dans les tâches quotidiennes. Leur recherche a été financée par le programme de recherche exploratoire pour les technologies avancées (ERATO) de l'Agence japonaise pour la science et la technologie (JST).
"L'objectif primordial de nos récents travaux était d'étudier l'édition du corps dans le cadre de notre groupe de recherche, ERATO JIZAI, " Adrien Verhulst, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore. "Modification du corps, tels que l'extension du corps avec la technologie de robotique d'assistance portable, est un concept facile à trouver dans certaines aires culturelles, comme dans la série manga Parasyte , par Hitoshi Iwaaki. On s'est dit, « Avoir un être artificiel attaché à vous et vous assister est exactement ce que nous recherchons, ' nous avons donc essayé de reproduire vaguement l'idée en réalité virtuelle."
Verhulst et ses collègues voulaient réaliser ce que l'on pourrait appeler une expérience de « corps partagé ». Au lieu de proposer une solution pour surmonter les limitations des systèmes actuels de collecte de retours visuels, ils ont entrepris de comparer et d'évaluer les approches existantes.
Pour faire ça, ils ont développé un système VR qui utilise la technologie optitrack pour suivre le corps d'un utilisateur et un visiocasque (HMD) pour visualiser la direction du corps du MBO et du bras robotique. Dans leur papier, les chercheurs appellent l'utilisateur du bras robotique le « corps principal » et le téléopérateur tiers le « corps parasite ».
"Il est logique de penser que si le 'corps parasite' est attaché au corps principal, puis quand le corps principal bouge, le parasite va finir malade, n'est-ce pas ?" dit Verhulst. "Par conséquent, les questions que nous nous sommes posées sont :Comment adapter les retours visuels collectés par le corps ? S'il s'agit d'un troisième point de vue, comme dans le jeu vidéo ? Ensuite, où doit-il être placé :au-dessus du corps principal, sur le côté, ou plutôt proche de l'action ? Peut-être pourrions-nous partager le même point de vue? Ou une vue dépendant du mouvement des deux personnes ?"
Des équipes de différentes entreprises et institutions ont présenté plusieurs approches pour recueillir un retour visuel des bras robotiques. Les plus importants d'entre eux sont le concept de « vue partagée », la vue à la troisième personne et la vue au plus près de l'action.
Comme le suggèrent leurs noms, l'approche de vue partagée recueille un retour visuel qui correspond à ce que l'utilisateur portant le bras robotique voit ; la troisième personne voit ce qu'une troisième personne verrait si elle se tenait à côté ou derrière l'utilisateur, et la vue proche de l'action montre un gros plan de la tâche en cours. Les chercheurs ont voulu étudier si ces différents modes de vue devaient dépendre du mouvement du corps principal, le corps du parasite, ou les deux.
Afin d'explorer cette question, ils ont mené une expérience sur 16 utilisateurs humains en utilisant le système de réalité virtuelle qu'ils ont développé. Cela leur a permis de recueillir des informations intéressantes sur les différentes approches pour la collecte de commentaires visuels. Néanmoins, leurs conclusions sont encore préliminaires, car le nombre de personnes ayant participé à leur étude est limité.
"Les gens ont besoin de se sentir orientés dans la direction de leur membre pour pouvoir l'utiliser. Essayez ceci :si vous placez une caméra devant vous sous un angle étrange, et ne pouvez vous voir que de cette caméra, vous aurez plus de difficulté à bouger votre bras dans une direction donnée, " expliqua Verhulst. " Cela signifie que chaque fois que le corps principal bouge, le corps du parasite se réoriente. De façon intéressante, nous n'avons pas remarqué de différence marquée dans les scores de possession de corps, ce qui signifie que peu importe le point de vue, les participants avaient l'impression qu'ils « possédaient » leur corps, et qu'ils en avaient le contrôle."
Les observations recueillies par Verhulst et ses collègues suggèrent que la dépendance des points de vue n'est pas si importante. En d'autres termes, si l'on collecte un retour visuel en plaçant une caméra sur le bras robotique, sur l'épaule de l'utilisateur humain, ou entre les deux, il/elle peut toujours obtenir la "propriété corporelle" correcte en regardant à travers la caméra.
"Les résultats que nous avons recueillis étaient très surprenants, " a ajouté Verhulst. " Nous n'avons pas non plus observé de difficulté significative en termes de charge de travail (c'est-à-dire charge physique, charge mentale, effort, temps), lequel, de nouveau, laisse entendre que la dépendance de la caméra n'a pas d'importance à cet égard. Cependant, la performance des participants était un peu meilleure dans des situations où la vue dépend à la fois du corps principal et du parasite, laissant entendre que pour une efficacité maximale, il peut être préférable de placer la caméra sur le corps principal, mais être motorisé pour suivre le mouvement de la personne contrôlant le bras du robot."
L'enquête menée par cette équipe de chercheurs s'est spécifiquement concentrée sur la dépendance à la perspective des opérateurs tiers du bras robotique dans la tâche qui impliquait de trouver et d'atteindre des objets. À l'avenir, le système de réalité virtuelle qu'ils ont développé pourrait également être utilisé pour étudier des approches permettant de recueillir des commentaires visuels sur des tâches plus élaborées et plus réalistes.
"La prochaine étape est de créer un environnement expérimental avec des situations et des configurations plus réalistes, " Ryô Takizawa, un autre chercheur impliqué dans l'étude, a déclaré TechXplore. « Explorer les modes de coopération dans le travail collaboratif, nous pensons restreindre les méthodes de communication et améliorer les modèles VR, etc."
Les chercheurs ont décidé d'utiliser la réalité virtuelle et de réaliser une expérience virtuelle car il s'agissait d'une solution simple et peu coûteuse qui ne nécessitait pas la maintenance de systèmes robotiques avancés. Afin de vérifier la validité de leurs conclusions, cependant, ils devront éventuellement comparer leurs résultats avec ceux obtenus à l'aide d'un vrai bras robotique.
Dans leurs futurs travaux, Verhulst et ses collègues prévoient également de mener une expérience similaire dans laquelle les participants sont formés à la tâche qu'ils effectueront au préalable, car ils pensent que cela conduirait à des résultats différents. Dans cette étude, En réalité, les utilisateurs n'ont reçu aucune formation préalable avant d'utiliser leur plateforme de réalité virtuelle.
« Nous devons réfléchir à la manière de concevoir une tâche ou un programme d'entraînement dans un contexte corporel édité et partagé, surtout en ce qui concerne la façon de lisser, sinon améliorer, tâches coopératives, " Katie Seaborn, un autre chercheur qui a participé à l'étude, a déclaré TechXplore. "J'ai exploré la notion de même temps, synchronisation de même mouvement, qui a été liée à des augmentations de la performance coopérative dans d'autres contextes. Nous nous demandons si une telle stratégie « d'action partagée » fonctionnerait dans ce cas, avec deux personnes partageant un corps très inhabituel en VR."
© 2019 Réseau Science X