Concasseur Véhicule terrestre sans pilote Photo avec l'aimable autorisation de Carnegie Mellon, Centre national de génie robotique
Concasseur Véhicule terrestre sans pilote Photo avec l'aimable autorisation de Carnegie Mellon, Centre national de génie robotique Crusher a fait ses débuts dans un véritable style de camion monstre :les deux prototypes sont entrés dans un bâtiment de l'Université Carnegie Mellon avec de la musique assourdissante et des lumières clignotantes. Un concasseur est resté là pendant que son homologue se mettait à rouler et à écraser des piles de voitures qui auraient la plupart des camions monstres reculant avec la queue entre les jambes. Le concasseur n'est pas un camion typique. Il peut rouler sur un mur vertical de 4 pieds tout en transportant 8, 000 livres de fret.
Le concasseur est un véhicule terrestre sans pilote ( UGV ) financé par la DARPA et conçu par le National Robotics Engineering Center de Carnegie Mellon ( NREC ). La poussée du projet Crusher - qui s'appuie sur un autre UGV conçu par NREC appelé Spinner (Crusher est parfois appelé Spinner version 2.0 ) - est à peu près l'objectif de toute la recherche et du développement financés par l'armée dans le monde UGV en ce moment :des capacités de perception accrues, autonomie et robustesse. L'armée américaine aimerait peu de choses plus qu'un drone, réservoir silencieux pouvant transporter une charge utile illimitée, se défendre contre l'ennemi et accélérer sans entrave sur un terrain qui ferait se recroqueviller le Hummer en position fœtale.
Le Crusher ne verra probablement jamais la production de masse. Le coût serait trop élevé (les concepteurs ne citent même pas de chiffre). Il est conçu comme un prototype fonctionnel pour tester diverses technologies que le NREC développe dans le cadre d'un programme appelé UPI .
UPI signifie U Véhicule de combat terrestre sans pilote P erceptOR (tout-terrain) je intégration, une bouchée financée par la DARPA qui englobe des expériences pour « évaluer les capacités de véhicules terrestres sans pilote (UGV) fonctionnant de manière autonome dans un large éventail de complexes, terrains tout-terrain" [réf]. Le Crusher de 6,5 tonnes pèse près de 30% de moins que Spinner et peut transporter plus de marchandises. La seule chose que le NREC a laissé de côté de la mise à niveau de Spinner est la capacité de continuer à rouler s'il est renversé Aucun mot sur la raison pour laquelle cette fonction cool a disparu, bien que la logique suggère qu'il s'agisse soit de rendre certaines des autres fonctions améliorées de Crusher possibles, soit de supprimer une capacité coûteuse qui n'est peut-être pas cruciale pour la mission principale d'UPI.
Donc, que peut faire Crusher ?
 Photo avec l'aimable autorisation de Carnegie Mellon, Centre national de génie robotique
Photo avec l'aimable autorisation de Carnegie Mellon, Centre national de génie robotique Selon le NREC, La technologie de Crusher est de six à 10 ans à compter de la mise en œuvre dans le monde réel. Bien que plus petit, les robots contrôlés par l'homme sont déjà arrivés sur le champ de bataille (voir Comment fonctionnent les robots militaires), massif, des robots sans pilote comme Crusher sont toujours dans les laboratoires. La complexité des systèmes de perception et de contrôle nécessaires à un robot à grande échelle pour gérer un terrain et des conditions inconnus est encore au stade de la recherche et du développement. Les systèmes de perception et de navigation de Crusher sont des prototypes conçus comme des plates-formes de test pour des approches de plus en plus innovantes des véhicules de combat au sol qui ne nécessitent aucune intervention humaine pour mener à bien leur mission.
Dans la section suivante, nous allons jeter un oeil à certains de ces systèmes. Puisque Crusher est avant tout un projet militaire, les détails complets ne sont pas disponibles pour le grand public, mais HowStuffWorks a néanmoins réussi à trouver des informations intéressantes.
 Prototypes de concasseurs Photo avec l'aimable autorisation de Carnegie Mellon, Centre national de génie robotique
Prototypes de concasseurs Photo avec l'aimable autorisation de Carnegie Mellon, Centre national de génie robotique Il y a trois domaines d'intérêt principaux dans le développement de Crusher :
Le squelette du concasseur est composé d'aluminium et de titane. Sa coque est un cadre spatial en aluminium (une structure ouverte de bielles) avec des nœuds en titane ultra-robustes joignant les bielles pour une résistance accrue en cas de collision probable avec de gros, objets durs. Immédiatement en dessous de la coque se trouve une plaque de protection - essentiellement une plaque suspendue, "pare-chocs" en acier monté sur amortisseur qui fait office de première défense, protéger la coque du contact initial avec des rochers, souches d'arbres et marches.
 Photo avec l'aimable autorisation de Carnegie Mellon, Centre national de génie robotique
Photo avec l'aimable autorisation de Carnegie Mellon, Centre national de génie robotique Pour le maintenir en mouvement au-dessus des obstacles et des terrains généralement hostiles, Crusher arbore un six roues, système de traction intégrale alimenté par un hybride diesel-électrique configuration qui permet un fonctionnement presque silencieux - une caractéristique pratique dans le travail de reconnaissance. Un 78 chevaux, le moteur turbodiesel agit comme un générateur dans le système, produisant une puissance continue de 58 kilowatts (kW) pour charger les 300 volts de Crusher, 18,7 kW, batterie lithium-ion. Les batteries font tourner à leur tour six moteurs électriques de 210 kW, un situé dans chacun des six moyeux de roue. Chaque moteur produit 282 chevaux. Comme la plupart des systèmes électriques hybrides, Crusher utilise le freinage par récupération pour redonner de l'énergie aux batteries à chaque fois qu'il ralentit (voir Comment fonctionnent les voitures hybrides pour en savoir plus sur le freinage par récupération). Le véhicule peut fonctionner uniquement sur batterie silencieuse sur 3 à 16 km (2 à 10 miles) en fonction de la vitesse et de la charge de chargement.
Étant donné que chaque roue est alimentée indépendamment, si un ou deux meurent, Le concasseur peut continuer. Il n'a besoin que de quatre des six roues pour maintenir ses capacités. Et s'il a soudainement besoin d'un revirement - disons, entouré sur trois côtés par des barrières infranchissables - il peut utiliser ses capacité de direction à glissement , un rayon de braquage nul, faire volte-face rapidement sans aucune marge de manœuvre.
Pour passer sous des obstacles bas, affronter un terrain rocheux ou mieux se cacher de l'ennemi, Le concasseur a une hauteur de caisse réglable de zéro à 30 pouces (76 cm). En plus du réglage en hauteur, La suspension du concasseur peut parcourir 30 pouces complets pour absorber les chocs, et il présente une rigidité réglable pour différentes conditions de sol. Nous avons pu localiser une vue sous le capot de Spinner, Le prédécesseur de Crusher - rappelez-vous que Crusher est une version améliorée de Spinner 1.0 :
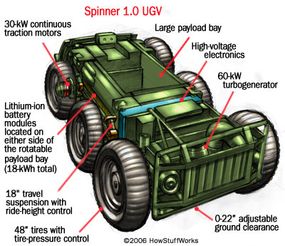 Le concasseur comporte des améliorations dans le réglage de la hauteur de caisse, course suspendue, poids du véhicule et capacité de chargement.
Le concasseur comporte des améliorations dans le réglage de la hauteur de caisse, course suspendue, poids du véhicule et capacité de chargement. Cadre puissant du concasseur, La configuration à six roues motrices et les capacités de suspension extrêmes permettent à l'UGV de se déplacer à grande vitesse, actuellement jusqu'à 26 mph (42 km/h), sur terrain difficile, face à des obstacles comme des fossés, rochers, pentes raides et barrières verticales jusqu'à 4 pieds, le tout sans perdre une miette.
Solidité, puissance et silence font de Crusher un outil de repérage idéal, mais c'est principalement le système d'autonomie de l'UGV que la DARPA a jusqu'à présent déboursé 35 millions de dollars pour développer. Le NREC n'a pas publié beaucoup d'informations détaillées sur le système UPI, mais dit que "cette technologie répartit les capacités de détection sur l'ensemble du véhicule pour aider à équilibrer sa perception et également prendre en charge les zones du véhicule qui peuvent être moins aptes à détecter l'environnement. Le logiciel [de détection] permettra également à Crusher d'apprendre et d'appliquer les informations précédemment recueillies à de nouveaux obstacles."
Nous savons que le matériel de perception se compose principalement de LADAR (détection et télémétrie laser) unités et réseaux de caméras . Une unité LADAR envoie un faisceau laser pour balayer une zone et mesure combien de temps il faut pour que le faisceau soit réfléchi vers le capteur laser de l'unité. Crusher a huit de ces unités - quatre balayant l'environnement horizontalement et quatre balayant verticalement. Il utilise six paires de caméras stéréo-vision pour la perception de la profondeur et quatre caméras couleur pour appliquer un pixel de couleur à chaque point de distance déterminé par le capteur LADAR.
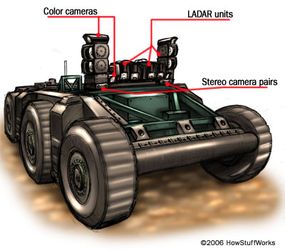 Première version du système de perception de Crusher
Première version du système de perception de Crusher L'incarnation la plus récente de Crusher dispose d'un 18 pieds mât télescopique pour collecter des données à partir d'un point de vue plus élevé. Le mât peut intégrer des parties du LADAR et de l'ensemble caméra vu ci-dessus, ou il peut simplement ajouter un ensemble supplémentaire de capteurs au système de perception.
 Photo avec l'aimable autorisation de Carnegie Mellon, Centre national de génie robotique
Photo avec l'aimable autorisation de Carnegie Mellon, Centre national de génie robotique Avec toutes les données LADAR et caméra combinées, Concasseur processeur embarqué crée une image 3D du paysage dans lequel Crusher se déplace. Le processeur est un Pentium 3 à 700 MHz qui contrôle les activités mécaniques de Crusher et exécute le logiciel de navigation qui gère le traitement des données des capteurs. Un l'unité de mesure inertielle ( IMU ) détecte l'altitude de Crusher, position et sens de déplacement à l'aide d'une combinaison d'accéléromètres (capteurs d'inclinaison) et de gyroscopes, Crusher est donc toujours conscient de son propre mouvement et de sa position par rapport au paysage. L'UGV dispose également d'un récepteur GPS intégré et d'une base de données GPS informatisée qui comprend des données de terrain préprogrammées.
Jusque là, des expériences sur le terrain ont montré que Crusher est en bonne voie vers une véritable autonomie. En test, Le concasseur s'est déplacé d'un point de cheminement GPS à un point de cheminement GPS espacé de plus de 0,6 mile (1 km) sans aucun contrôle extérieur. Grâce à ses systèmes de perception et de navigation, Le concasseur peut réagir aux obstacles à la volée - il n'a pas besoin d'un opérateur pour lui dire quoi faire lorsqu'il heurte quelque chose. Il peut gravir une pente supérieure à 40 degrés, conduire juste sur une marche de 4 pieds et traverser une tranchée de 80 pouces en utilisant ses propres capacités de prise de décision. La capacité de franchir les tranchées est particulièrement intéressante - les pneus du Crusher sont montés de manière à pouvoir descendre pour soutenir le véhicule pendant qu'il traverse un espace.
 Photo avec l'aimable autorisation de Carnegie Mellon, Centre national de génie robotique
Photo avec l'aimable autorisation de Carnegie Mellon, Centre national de génie robotique Spécifications du concasseur :
Les spécifications de taille et de poids signifient qu'un seul avion cargo C-130H peut transporter deux concasseurs au combat n'importe où dans le monde. En août 2006, Le concasseur a été équipé d'une monture Rafael Mini Typhoon qui contient un fusil de calibre .50, soulignant la possibilité que les rôles de combat puissent devenir un objectif de plus en plus important dans le développement de la technologie d'autonomie pour les véhicules militaires. Dans la section suivante, nous examinerons l'avenir du prototype Crusher et découvrirons comment il s'inscrit dans la tendance générale de la recherche et du développement militaires.
 Photo avec l'aimable autorisation de Carnegie Mellon, Centre national de génie robotique
Photo avec l'aimable autorisation de Carnegie Mellon, Centre national de génie robotique En 2006, l'armée américaine a déployé environ 4, 000 robots de combat pour le service actif. L'armée utilise ces robots principalement pour « flairer » les bombes et nettoyer les bâtiments et autres structures fermées. celui de l'armée Futurs systèmes de combat ( FCS ) cherche à dépenser environ 300 millions de dollars pour financer des mises à jour visant à étendre les rôles des robots de champ de bataille. Le FCS recherche des mules robotisées capables de transporter des marchandises aux côtés de troupes sur un terrain accidenté et des véhicules sans pilote beaucoup plus gros qui peuvent fonctionner sans intervention humaine dans les zones de reconnaissance et de patrouille aux frontières, renvoyer des données cruciales aux troupes. Si ces gros, les véhicules autonomes peuvent également transporter d'énormes charges utiles sur des terrains difficiles sans perdre de vitesse, ce serait un bonus supplémentaire. Crusher ou quelque chose comme ça serait idéal dans ces derniers rôles.
Le concasseur lui-même ne verra probablement pas le déploiement. Il s'agit principalement d'un projet de recherche et sera en phase de test et d'expérimentation jusqu'en 2008. A cette époque, le NREC remettra la technologie du concasseur à la DARPA afin qu'elle puisse être appliquée à des projets connexes, dont la plupart relèvent du domaine du Future Combat System. Le FCS mène des programmes de développement comme le véhicule armé de reconnaissance (ARV), qui vise à réaliser une pleine autonomie, véhicule prêt au combat pour les missions de reconnaissance; et le système de navigation autonome (ANS), un programme global visant à développer des capacités d'autonomie de plate-forme commune pour un large éventail de robots militaires. L'objectif global de FCS est l'intégration transparente des véhicules avec et sans pilote, terrestre et aérien, dans une structure qui peut être gérée via un seul, système de contrôle de type Web.
Par le biais de FCS, nous pourrions voir des véhicules de type Crusher soutenir des troupes dans des opérations de combat dans cinq à dix ans. Ils commenceront très probablement dans des rôles de reconnaissance, puis passeront au combat, soutenir les troupes au lieu de les remplacer. Mais la technologie d'autonomie de pointe de Crusher n'est pas spécifique à l'armée. Le NREC envisage - et a en cours - des projets de recherche qui utilisent les systèmes développés pour Crusher dans des applications civiles. En une décennie, nous pouvions voir des véhicules autonomes effectuer des tâches risquées dans des domaines comme l'agriculture, l'exploitation minière et la construction, transférant finalement une partie du danger auquel sont confrontés les humains dans ces domaines sur des homologues robotiques remplaçables qui ne ressentent aucune douleur.
Pour plus d'informations sur le concasseur, UGV et sujets connexes, consultez les liens sur la page suivante.
Sources