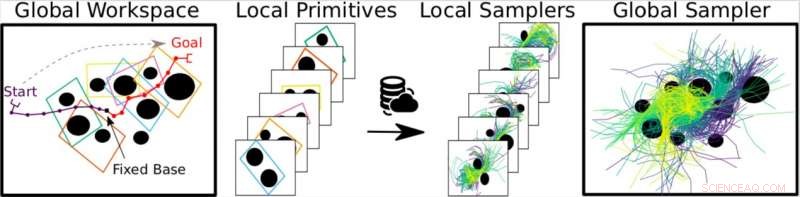
Une illustration du cadre proposé dans un manipulateur planaire. Crédit :Chamzas, Shrivastava et Kavraki.
Alors que les humains peuvent exécuter des mouvements naturellement et instantanément, les robots nécessitent des stratégies avancées de planification de mouvement afin de naviguer dans leur environnement. La planification du mouvement est donc un domaine clé de la recherche en robotique, visant à développer des outils et des techniques permettant aux robots de fonctionner de manière autonome dans une variété d'environnements.
Alors que des études antérieures ont introduit une variété de techniques de planification de mouvement, notamment les algorithmes basés sur l'échantillonnage, la plupart d'entre eux ne fonctionnent pas de manière optimale dans tous les environnements. Une limitation clé de bon nombre de ces approches est qu'elles approchent la connectivité d'espaces de grande dimension avec un petit nombre d'échantillons, ce qui entrave leurs performances dans des scénarios où les zones nécessaires à la connectivité de l'espace ont une faible probabilité d'être échantillonnées. C'est ce que l'on appelle communément le « problème des passages étroits ».
Pour remédier aux limites des méthodes de planification de mouvement existantes, chercheurs de l'Université Rice, au Texas, ont développé une nouvelle approche qui décompose l'espace de travail en primitives locales, mémoriser leurs expériences locales sous la forme d'échantillonneurs locaux et les stocker dans une base de données. Leur méthode, décrit dans un article prépublié sur arXiv, est principalement une preuve de concept, car il n'a jusqu'à présent été testé que dans un cadre géométrique plutôt simplifié. Néanmoins, le travail de ces chercheurs a le potentiel de résoudre certains défis clés rencontrés dans la recherche sur la planification du mouvement.
"Notre étude s'est concentrée uniquement sur le problème de planification de mouvement géométrique, " Constantin Chamzas, l'un des chercheurs qui a mené l'étude, Raconté TechXplore . "En un mot, vous avez un robot et des obstacles et vous voulez trouver un chemin pour déplacer votre robot d'un point A à un point B sans heurter les obstacles."
En plus de ces capacités générales de planification de mouvement, dans des scénarios réels (par exemple, lors de tâches ménagères), un robot devrait également résoudre des requêtes de planification de mouvement qui se répètent en permanence. La plupart des approches de planification de mouvement existantes obligent les robots à effectuer des tâches réelles en résolvant de nouvelles requêtes à partir de zéro, même si une nouvelle requête ressemble à une requête terminée avec succès dans le passé.

Exemple d'un robot ramassant des cylindres dans une bibliothèque, qui est une tâche avec des requêtes de planification de mouvement répétitives. Crédit :Chamzas, Shrivastava et Kavraki.
Les chercheurs tentent donc de développer de nouvelles techniques qui utilisent les solutions des plans de mouvement précédents pour éclairer la recherche d'une solution à une nouvelle requête de planification de mouvement similaire. L'approche conçue par Chamzas et ses collègues y parvient en utilisant des connaissances préalables liées à l'environnement qui ciblent spécifiquement les passages étroits précédemment rencontrés pour adapter sa stratégie d'échantillonnage au problème à résoudre.
« Pendant la formation, la méthode proposée décompose le problème donné en sous-problèmes plus faciles, résoudre chacun individuellement, puis stocke ces sous-solutions dans une base de données sous forme de distributions d'échantillonnage, " expliqua Chamzas. " Lorsqu'un nouveau problème de planification surgit, le problème global est à nouveau décomposé en problèmes locaux, et notre méthode récupère les distributions d'échantillonnage pertinentes qui correspondent aux distributions locales pour créer une distribution d'échantillonnage globale qui guide la recherche de manière beaucoup plus informative.
Essentiellement, l'approche motion planning imaginée par Chamzas et ses collègues décompose un problème en sous-problèmes, combinant des méthodes de base de données traditionnelles avec un échantillonnage informé. Cela le distingue des approches existantes, qui utilisent généralement une base de données avec des solutions précalculées qui sont réparées au moment de l'exécution ou utilisent des modèles qui tentent de déduire une bonne distribution d'échantillonnage pour un environnement donné.
« Les deux principaux apports de notre étude sont que certains problèmes, qui étaient auparavant pratiquement impossibles à résoudre avec les méthodes traditionnelles, peut être résolu par décomposition et que l'utilisation de cette combinaison bases de données/échantillonnage est plus efficace dans certains cas que d'autres méthodes, " a déclaré Chamzas.
Jusque là, les chercheurs ont évalué leur méthode dans des tests préliminaires avec des primitives géométriques simples. Les résultats sont prometteurs, car leur méthode leur a permis de résoudre des problèmes que les approches précédentes étaient soit incapables de résoudre, soit très mal résolus.
À l'avenir, l'approche proposée par Chamzas et ses collègues pourrait aider à surmonter certaines des limitations des approches de planification de mouvement existantes, permettant aux robots de transférer les connaissances précédemment acquises dans différents environnements et ainsi d'améliorer leurs performances. Les chercheurs prévoient maintenant d'appliquer la même approche dans des environnements géométriques plus complexes. Ils aimeraient également explorer les façons dont leur méthode pourrait apprendre les distributions d'échantillonnage, plutôt que de les adapter à des solutions plus anciennes.
© 2019 Réseau Science X