Les chercheurs développent des actionneurs souples qui offriront aux robots un toucher doux. Crédit :Université de technologie de Delft
Les chercheurs de la TU Delft ont développé des actionneurs hautement programmables qui, semblable à la main humaine, combiner des matériaux souples et durs pour effectuer des mouvements complexes. Ces matériaux ont un grand potentiel pour les robots mous qui peuvent interagir efficacement et en toute sécurité avec les humains et d'autres objets délicats. Les scientifiques rendent compte de leurs travaux en Horizons de matériaux dans le numéro du 8 juillet.
Mou, tendre
"Les robots sont généralement gros et lourds. Mais vous voulez aussi des robots qui peuvent agir avec délicatesse, par exemple lors de la manipulation de tissus mous à l'intérieur du corps humain. Le domaine qui étudie cette question, robotique douce, est maintenant vraiment en train de décoller, " dit le professeur Amir Zadpoor, qui a supervisé la recherche présentée dans Horizons de matériaux .
"Ce que tu veux vraiment, est quelque chose qui ressemble aux caractéristiques de la main humaine, y compris le toucher doux, mouvements rapides mais précis, et le pouvoir. Et c'est ce que nos matériaux programmables imprimés en 3D s'efforcent d'atteindre.
Accordabilité
Grâce à leur toucher doux, la robotique douce peut interagir efficacement et en toute sécurité avec les humains et d'autres objets délicats. Des mécanismes programmables logiciels sont nécessaires pour alimenter cette nouvelle génération de robots. Métamatériaux mécaniques flexibles travaillant sur la base de l'instabilité mécanique, offrent des fonctionnalités sans précédent programmées dans leur tissu architectural qui les rendent potentiellement très prometteurs en tant que mécanismes souples. "Toutefois, l'accordabilité des métamatériaux mécaniques proposés jusqu'à présent a été très limitée, ", explique le chercheur et premier auteur Shahram Janbaz.
Programmable
« Nous présentons maintenant de nouvelles conceptions de métamatériaux mécaniques ultra-programmables où non seulement la force et l'amplitude d'actionnement, mais également le mode d'actionnement peuvent être sélectionnés et réglés dans une très large plage. Nous montrons également quelques exemples d'utilisation de ces actionneurs souples. en robotique, par exemple comme commutateur de force, contrôleurs cinématiques, et un effecteur final pick-and-place, " dit Janbaz.
flambage
« La fonction est déjà incorporée dans le matériau, " explique Zadpoor. " Par conséquent, nous avons dû approfondir le phénomène de flambement. Cela était autrefois considéré comme la quintessence de l'échec de la conception, mais a été exploité au cours des dernières années pour développer des métamatériaux mécaniques avec des fonctionnalités avancées. La robotique douce en général et les actionneurs souples en particulier pourraient grandement bénéficier de ces matériaux de conception. Libérer le grand potentiel des matériaux pilotés par flambage est, cependant, subordonnée à la résolution de la principale limitation des conceptions présentées à ce jour, à savoir la portée limitée de leur programmabilité. Nous avons pu calculer et prédire des modes de flambement plus élevés et rendre le matériau prédisposé à ces modes plus élevés."

Un bras robotique conventionnel est modifié à l'aide des actionneurs souples développés pour fournir un toucher doux pendant les tâches de prélèvement et de placement. Crédit :Université de technologie de Delft
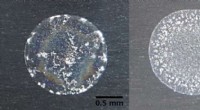
impression en 3D
"Donc, nous présentons des métamatériaux pilotés par flambage multi-matériaux avec des niveaux élevés de programmabilité, " explique Janbaz. " Nous avons combiné des approches de conception rationnelle basées sur des modèles informatiques prédictifs avec des techniques avancées de fabrication additive multi-matériaux pour imprimer en 3D des matériaux cellulaires avec des distributions arbitraires de matériaux mous et durs dans les parties centrales et angulaires de leurs cellules unitaires. En utilisant la géométrie et la distribution spatiale des propriétés des matériaux comme principaux paramètres de conception, nous avons développé des métamatériaux mécaniques souples se comportant comme des mécanismes dont la force d'actionnement et l'amplitude d'actionnement pouvaient être ajustées."