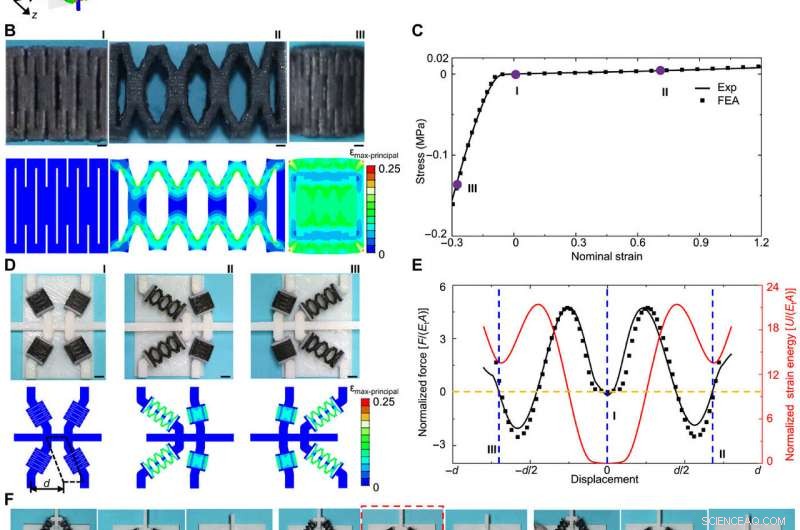
Concepts de conception et démonstration de métamatériaux mécaniques multistables 2D avec des microstructures de kirigami en forme de X. (A) Illustration schématique de la construction hiérarchique d'un métamatériau mécanique multistable 2D, y compris les cellules octogonales, Structure de blocs de construction en forme de X, et les microstructures de kirigami. (B) Images optiques et résultats FEA des microstructures du kirigami à l'état non déformé, étiré, et les états compressés. (C) Courbe contrainte-déformation nominale de la microstructure du kirigami en (B), sous la traction et la compression uniaxiales. (D) Images optiques et résultats FEA des trois configurations stables différentes de la structure du bloc de construction en forme de X imprimée en 3D. (E) Dépendances de la force normalisée et de l'énergie de déformation normalisée sur le déplacement horizontal appliqué à la structure du bloc de construction tristable en forme de X dans (D). A désigne l'aire de la section transversale de la microstructure; Ec et Et désignent les modules de compression et de traction, respectivement; d désigne la distance indiquée en (D). (F) Démonstration expérimentale des configurations stables d'une cellule octogonale dans le métamatériau mécanique. Les flèches rouges indiquent les directions dans lesquelles se déplacent les barres de liaison horizontales et verticales. L'état du milieu où aucune barre de connexion ne bouge est marqué par un cadre en pointillé rouge. (G) Démonstration expérimentale de cinq configurations stables représentatives d'un métamatériau mécanique imprimé en 3D avec les mêmes paramètres géométriques que celui de (A). Barres d'échelle, 1 mm (B), 5 mm (D et F), et 25 mm (G). Crédits photos :Hang Zhang, Université de Tsinghua. Crédit :Avancées scientifiques, doi:10.1126/sciadv.abf1966
Les métamatériaux mécaniques multistables sont des matériaux artificiels dont la microarchitecture offre plus de deux configurations stables différentes. Les métamatériaux mécaniques existants reposent sur des conceptions à base d'origami ou de kirigami avec une instabilité d'enclenchement et des mécanismes souples microstructurés. Les structures évolutives pouvant être construites à partir de métamatériaux mécaniques avec un nombre extrêmement important de configurations stables programmables restent insaisissables. Dans un nouveau rapport maintenant publié le Avancées scientifiques , Hang Zhang et une équipe de recherche en ingénierie, électronique, et technologie de structure avancée à Pékin en Chine, utilisé l'asymétrie de traction/compression élastique des microstructures de kirigami pour concevoir une classe de structures tristables en forme de X. L'équipe a utilisé ces constructions comme éléments de base pour construire des métamatériaux mécaniques hiérarchiques avec des géométries cylindriques unidimensionnelles, Réseaux carrés 2D et réseaux 3D cubiques ou octaédriques à multistabilité multidirectionnelle. Le nombre d'états stables augmente avec le nombre de cellules de métamatériaux mécaniques incorporés dans l'œuvre, et la multistabilité polyvalente et la diversité structurelle ont démontré des applications au sein d'opérateurs logiques ternaires mécaniques avec des fonctionnalités inhabituelles.
Métamatériaux mécaniques
Les métamatériaux mécaniques sont un type de matériaux artificiels constitués de microstructures périodiques avec des architectures conçues pour offrir des propriétés mécaniques qui surpassent les matériaux conventionnels. Malgré les avancées dans le domaine, il reste difficile de concevoir des métamatériaux hiérarchiques avec divers états stables et des propriétés à l'état stable précisément adaptées. Dans ce travail, Zhang et al. introduit une classe de microstructures de kirigami en forme de X en tant qu'éléments de construction tristables à partir d'un schéma ascendant pour obtenir des métamatériaux mécaniques hiérarchiques, avec un nombre accru d'états stables. L'asymétrie de traction-compression élastique des microstructures de kirigami et la tristabilité contrôlée indépendamment des métamatériaux hiérarchiques leur ont permis de réaliser des vibrations basse fréquence contrôlées le long de différentes directions dans le plan pour les fonctions souhaitées, y compris la suppression du bruit et la communication non linéaire.
Métamatériaux mécaniques multistables à constructions hiérarchiques
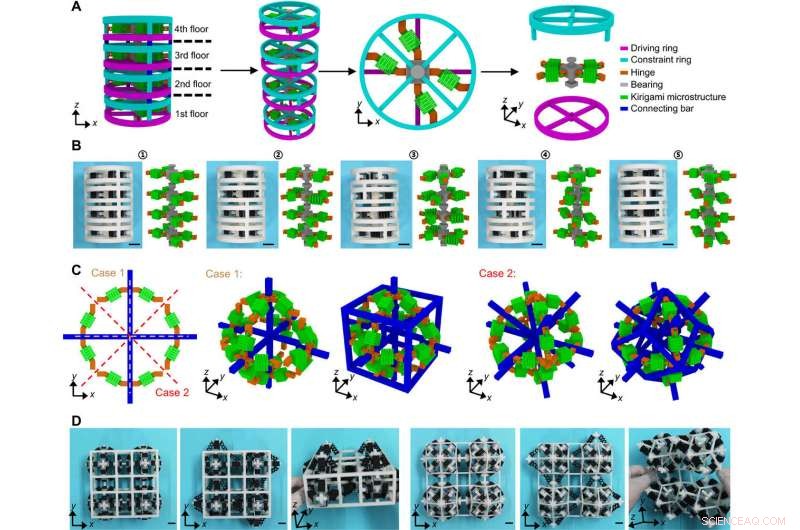
Stratégie de conception bottom-up et démonstration de métamatériaux mécaniques multistables 3D. (A) Illustration schématique d'un métamatériau mécanique multistable en torsion composé de quatre couches adressables individuellement. Chaque couche est composée d'un anneau d'entraînement, un anneau contraignant, charnières, un roulement, et une structure de blocs de construction en forme de X. (B) Images optiques et résultats FEA de cinq configurations stables représentatives d'un métamatériau mécanique de torsion imprimé en 3D avec les mêmes paramètres géométriques que celui de (A). (C) Illustration schématique des métamatériaux mécaniques multistables cubiques et octaédriques. Les lignes pointillées orange et rouge indiquent les axes de rotation de la cellule octogonale pour former des métamatériaux mécaniques 3D. (D) Démonstration expérimentale de trois configurations stables représentatives des métamatériaux mécaniques multistables cubiques et octaédriques imprimés en 3D. Barres d'échelle, 15 millimètres. Crédits photos :Hang Zhang, Université de Tsinghua. Crédit :Avancées scientifiques, doi:10.1126/sciadv.abf1966
L'équipe a mené une modélisation mécanique quantitative des microstructures de kirigami en forme de X sur la base d'analyses par éléments finis. Les résultats ont indiqué un mécanisme de déformation dominé par la flexion sous étirement uniaxial avec un module de traction et un module de compression beaucoup plus faibles. L'énergie de déformation calculée a indiqué trois points minimum pour confirmer l'instabilité de la structure du bloc de construction en forme de X. Les scientifiques ont également présenté des métamatériaux mécaniques multistables avec des géométries cylindriques 1D et des réseaux cubiques ou octaédriques 3D. La conception a permis deux configurations stables supplémentaires basées sur des rotations dans le sens horaire ou antihoraire, comme en témoigne le profil énergétique. La cellule octogonale offrait jusqu'à 3 20 configurations stables en théorie, qui était jusqu'alors inaccessible. Le nombre extrême d'états stables a fourni un concept prometteur pour le traitement de l'information, comme le montrent les portes logiques ternaires mécaniques et les opérateurs logiques combinés.
Conception et démonstration expérimentale de la cellule octogonale. Crédit :Avancées scientifiques, doi:10.1126/sciadv.abf1966
Relation entre les propriétés mécaniques et les conceptions géométriques des microstructures de kirigami et des structures de blocs de construction en forme de X
Les scientifiques ont ensuite cherché à comprendre la relation microstructure-propriété pour évaluer la conception hiérarchique des métamatériaux mécaniques multistables proposés. Pour y parvenir, ils se sont concentrés sur la structure du bloc de construction en forme de X et ont établi la connexion de ses paramètres géométriques clés au paysage énergétique résultant. L'équipe a divisé les paramètres géométriques en deux catégories, l'une liée à la microstructure du kirigami et l'autre au composite en forme de X. Ils ont ensuite développé un modèle théorique de déformation finie pour prédire la courbe contrainte-déformation de la microstructure du kirigami, où les résultats théoriques étaient en bon accord avec les expériences. L'équipe a encore augmenté le module de compression des microstructures du kirigami en remplaçant la région de connexion par des polymères durs. Les microstructures simulées qui se sont déformées sous tension et compression étaient également en bon accord avec les images optiques.
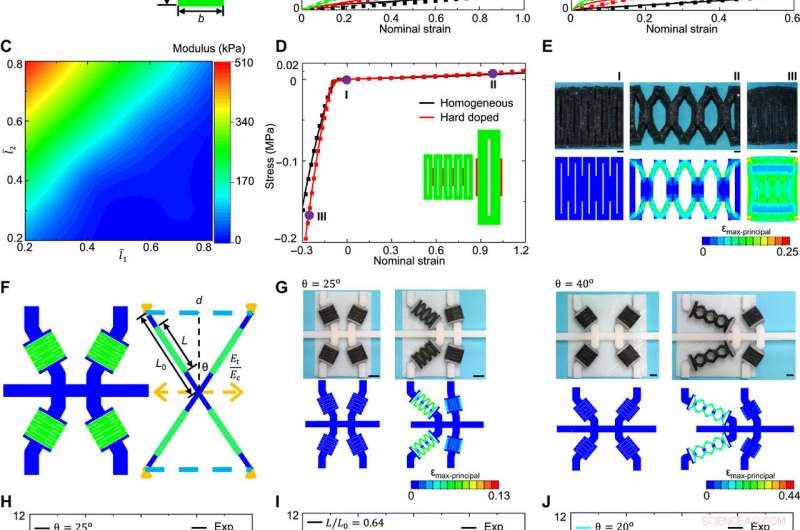
Relation microstructure-propriété de la structure du bloc de construction en forme de X. (A) Illustration schématique de la microstructure du kirigami et des principaux paramètres de conception. (B) Résultats expérimentaux et FEA des courbes contrainte-déformation de la microstructure du kirigami avec une gamme de différentes longueurs de coupe normalisées (l¯1=1/a et l¯2=l2/a). (C) Graphique de contour du module d'élasticité effectif de la microstructure du kirigami par rapport aux longueurs de coupe normalisées (l¯1 et l¯2). (D) Résultats expérimentaux et FEA des courbes contrainte-déformation en traction et en compression de la microstructure du kirigami avec des conceptions homogènes et composites. (E) Images optiques et résultats FEA de la microstructure composite du kirigami à différents états de chargement [marqué en (D)]. (F) Illustration schématique de la structure du bloc de construction en forme de X. Les paramètres clés de conception incluent le rapport de module (η =Ec/Et) de la microstructure du kirigami en compression à celle en traction, l'angle de la structure en X, et le rapport de longueur (L/L0). (G) Images optiques et résultats FEA des deux configurations stables de structures de blocs de construction en forme de X avec =25° et 40° (gauche et droite) pour un rapport de longueur fixe (L/L0 =0,64). (H) Courbes charge-déplacement de la structure homogène du bloc de construction en forme de X avec différents angles (θ), pour un rapport de module fixe (η =101) et un rapport de longueur (L/L0 =0,64). (I) Résultats similaires dans le cas de rapports de longueur différents (L/L0) pour un rapport de module fixe (η =101) et un angle (θ =30°). (J) Courbes charge-déplacement de la structure du bloc de construction composite en forme de X avec différents angles (θ) pour un rapport de module fixe (η =240) et un rapport de longueur (L/L0 =0,64). Barres d'échelle, 1 mm (E) et 5 mm (G). Crédits photos :Hang Zhang, Université Tsinghua.Crédit :Avancées scientifiques, doi:10.1126/sciadv.abf1966
Portails ternaires mécaniques
La flexibilité de la structure du bloc de construction tristable en forme de X a permis des applications de la fonction logique ternaire mécanique, ce qui n'a pas pu être réalisé en utilisant des blocs de construction bistables. Par exemple, avec des systèmes mécaniques présentés dans des travaux antérieurs, il était très difficile de combiner de nombreuses portes de base pour des opérations logiques complexes. Relativement, L'opération logique ternaire pouvait transmettre une plus grande quantité d'informations tout en utilisant un nombre réduit de portes de base pour effectuer la même opération et présentait des avantages dans la logique floue et le traitement du signal. L'équipe a en outre présenté une porte NON ternaire mécanique composée de deux modules comprenant un convertisseur analogique-numérique et un processeur de déplacement numérique. Ils ont réalisé le convertisseur analogique-numérique en utilisant la structure de blocs de construction tristable en forme de X et ont développé le processeur de déplacement numérique pour inverser la direction du déplacement d'entrée et ont mené des démonstrations expérimentales de la fonctionnalité de la porte NON fabriquée.
L'opération logique ternaire des portes ET et OU était plus compliquée par rapport aux opérateurs binaires. La flexibilité de la conception modulaire a facilité les opérations logiques complexes basées sur les portes de base. Le grand nombre d'états stables facilités par des métamatériaux mécaniques multistables a permis des opérations ternaires complexes d'entrées multiples. Par exemple, un opérateur logique basé sur un métamatériau mécanique a servi de convertisseur analogique-numérique intégré à un processeur de déplacement numérique spécialement conçu pour réaliser une opération cible complexe pour quatre entrées différentes. Les opérateurs logiques de cette nature peuvent permettre un traitement parallèle des entrées dans différentes directions pour obtenir deux sorties indépendantes.
Applications à la modulation d'amplitude de la vibration basse fréquence. (A) Illustration conceptuelle de la conception modulaire du modulateur d'amplitude. Ici, le modulateur d'amplitude travaille selon les axes x et y, et le signe des déplacements d'entrée/sortie est cohérent avec le signe des axes de coordonnées. Le module 1 sert à affaiblir la transmission de force, et le module 2 combine la force transmise avec les unités tristables pour obtenir une sortie de déplacement régulé. (B) Déplacements d'entrée et de sortie le long de la direction x en fonction du temps pour un faible niveau d'amplitude, montrant la fonction de filtrage de l'onde triangulaire en tant qu'onde triangulaire tronquée. Les images optiques sur le panneau inférieur correspondent aux deux états marqués dans les courbes. (C) Résultats similaires dans le cas d'un niveau d'amplitude intermédiaire, montrant la fonction de filtrage de l'onde triangulaire en tant qu'onde de pas. (D) Résultats similaires dans le cas d'un niveau d'amplitude élevé, montrant la fonction de filtrage de l'onde triangulaire en onde carrée. Barres d'échelle, 15 millimètres. Crédits photos :Hang Zhang, Université de Tsinghua. Avancées scientifiques, doi:10.1126/sciadv.abf1966 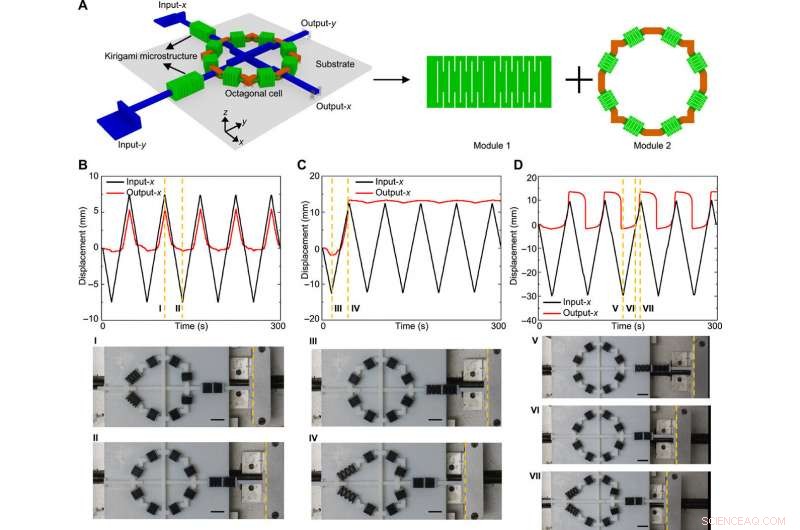
Les scientifiques ont présenté les conceptions d'un modulateur d'amplitude bidirectionnel développé avec des métamatériaux mécaniques multistables. Ils ont filtré les vibrations basse fréquence du montage expérimental, où le déplacement d'entrée négatif a été considérablement supprimé, tandis que le déplacement d'entrée positif transmis avec une fidélité relativement élevée. De tels dispositifs mécaniques seront efficaces pour l'intégration dans des robots travaillant dans des environnements difficiles tels que des radiations élevées et des champs magnétiques puissants, où les appareils électroniques ne fonctionneraient pas aussi efficacement. La capacité de moduler les vibrations peut également être utilisée pour la suppression du bruit et la communication non linéaire.
Démonstration expérimentale des opérateurs logiques complexes. Avancées scientifiques, doi:10.1126/sciadv.abf1966
Perspectives
De cette façon, Hang Zhang et ses collègues ont détaillé la conception, fabrication et caractérisation d'une classe de métamatériaux mécaniques hiérarchiques avec un nombre exponentiellement accru d'états stables. L'équipe a commencé avec la structure de blocs de construction tristable en forme de X programmable et a progressé pour concevoir des métamatériaux mécaniques hiérarchiques, notamment des géométries cylindriques 1D, Réseaux carrés 2D et réseaux 3D cubiques ou octaédriques. Ces constructions ont montré une capacité de multistabilité en torsion ou de multistabilité multidirectionnelle contrôlée indépendamment. Les résultats ont mis en lumière la relation sous-jacente entre les géométries microstructurales et le paysage énergétique qui en résulte. L'équipe a montré des applications dans les portes logiques ternaires mécaniques, y compris les trois portes de base (ET, NE PAS, et portes OU) et leurs opérations logiques combinées. Les dispositifs mécaniques sont prometteurs pour des applications dans la robotique douce et les actionneurs. Les dispositifs mécaniques seront plus avantageux que les dispositifs électriques traditionnels pour économiser l'énergie et pour la résistance à la corrosion dans les environnements difficiles.
© 2021 Réseau Science X